我刚开始学习多视角立体视觉技术。
但是我不太理解视差和深度(视差图和深度图)。
你能给我一个直观的解释吗?
谢谢。
我刚开始学习多视角立体视觉技术。
但是我不太理解视差和深度(视差图和深度图)。
你能给我一个直观的解释吗?
谢谢。
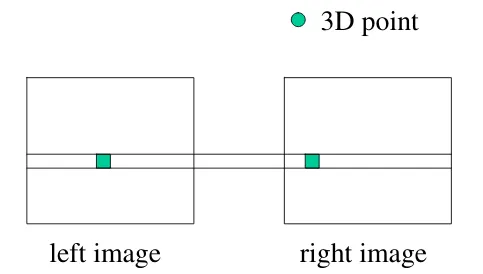
视差图像是一个简单的图像,其中每个像素给出了该3D点的视差。
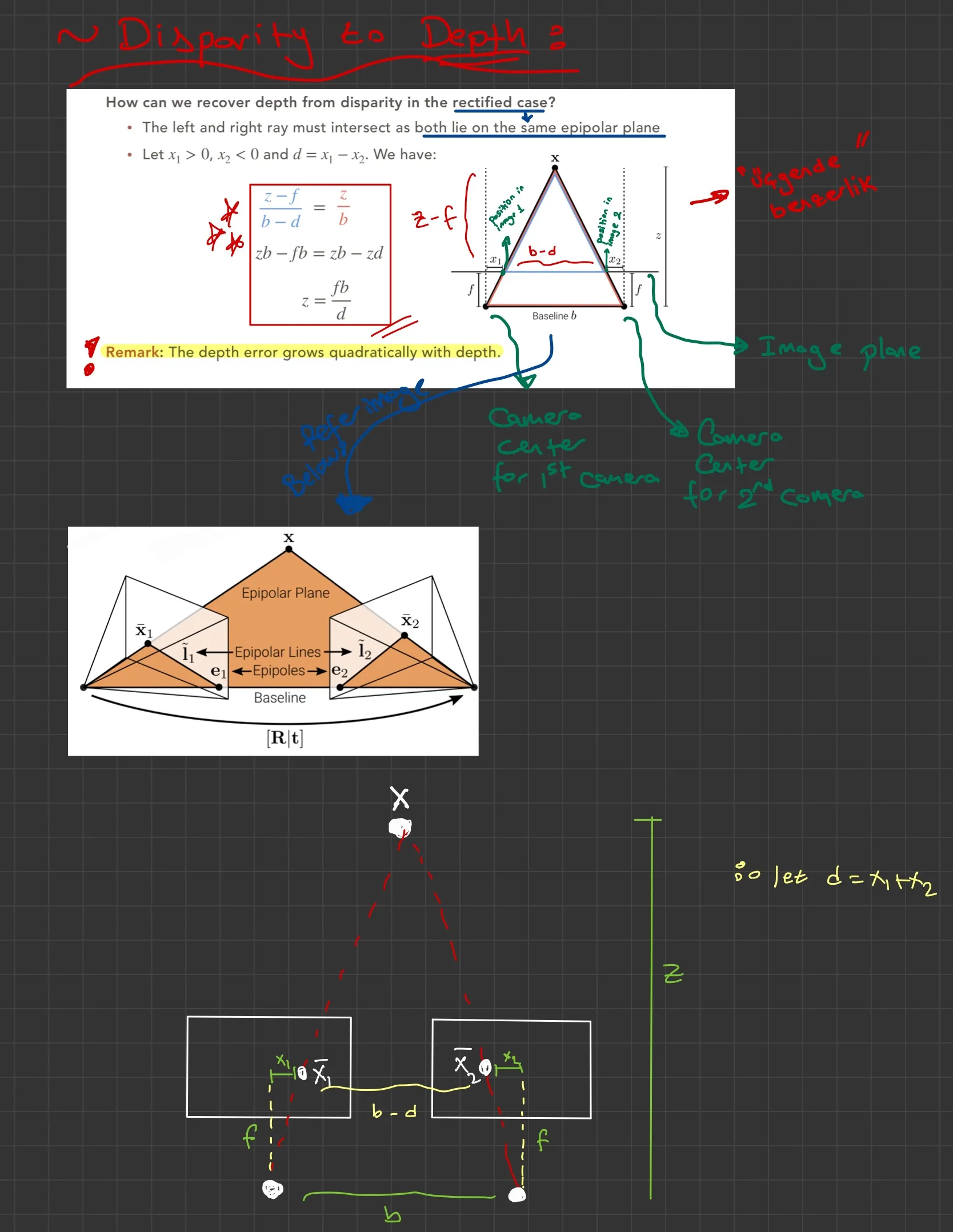
可以通过使用对应点的视差来计算深度(3D点的实际z位置),例如在简单情况下,如下所示:
depth = (baseline * focal length) / disparity)
其中baseline是相机之间的距离。
通过获取每个像素的深度,可以得到深度图像。
在这里阅读更多。
视差是指一个点在左右图像之间的投影水平位移。而深度则是指位于真实三维世界中(x、y、z)的点的z坐标(通常为z)。
同时需要注意的是,鉴于视差的差异,可以根据用于拍摄计算视差的图像的相机内参(b,f)计算相应的深度。
我在下面附上了一些笔记,希望能为这个过程提供一些见解。 从视差计算深度的我的笔记
{kind=link}