我试图扫描两张32bppArgb格式的图片,识别出它们之间的差异,并将差异块的边界存储在一个矩形列表中。
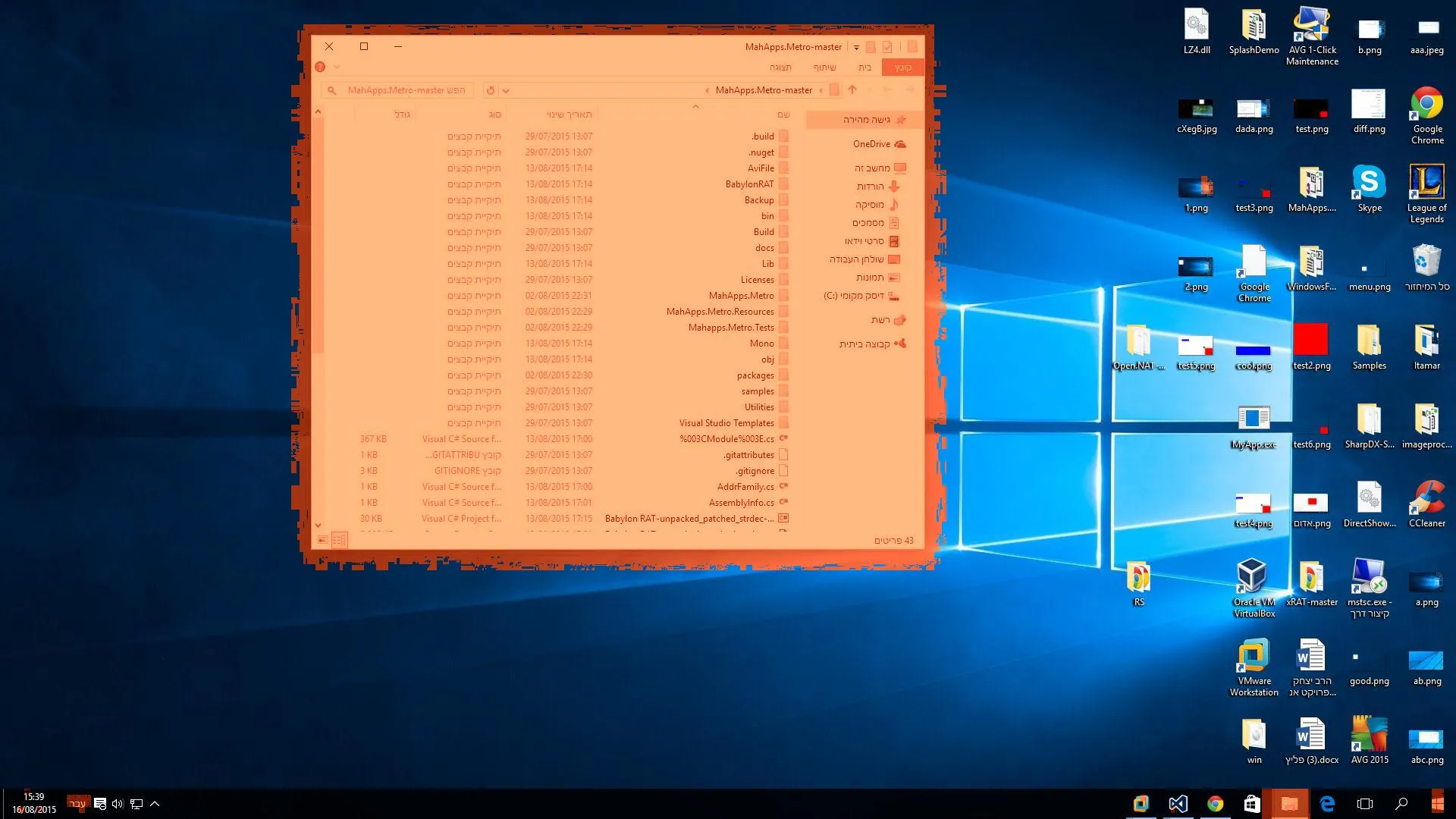
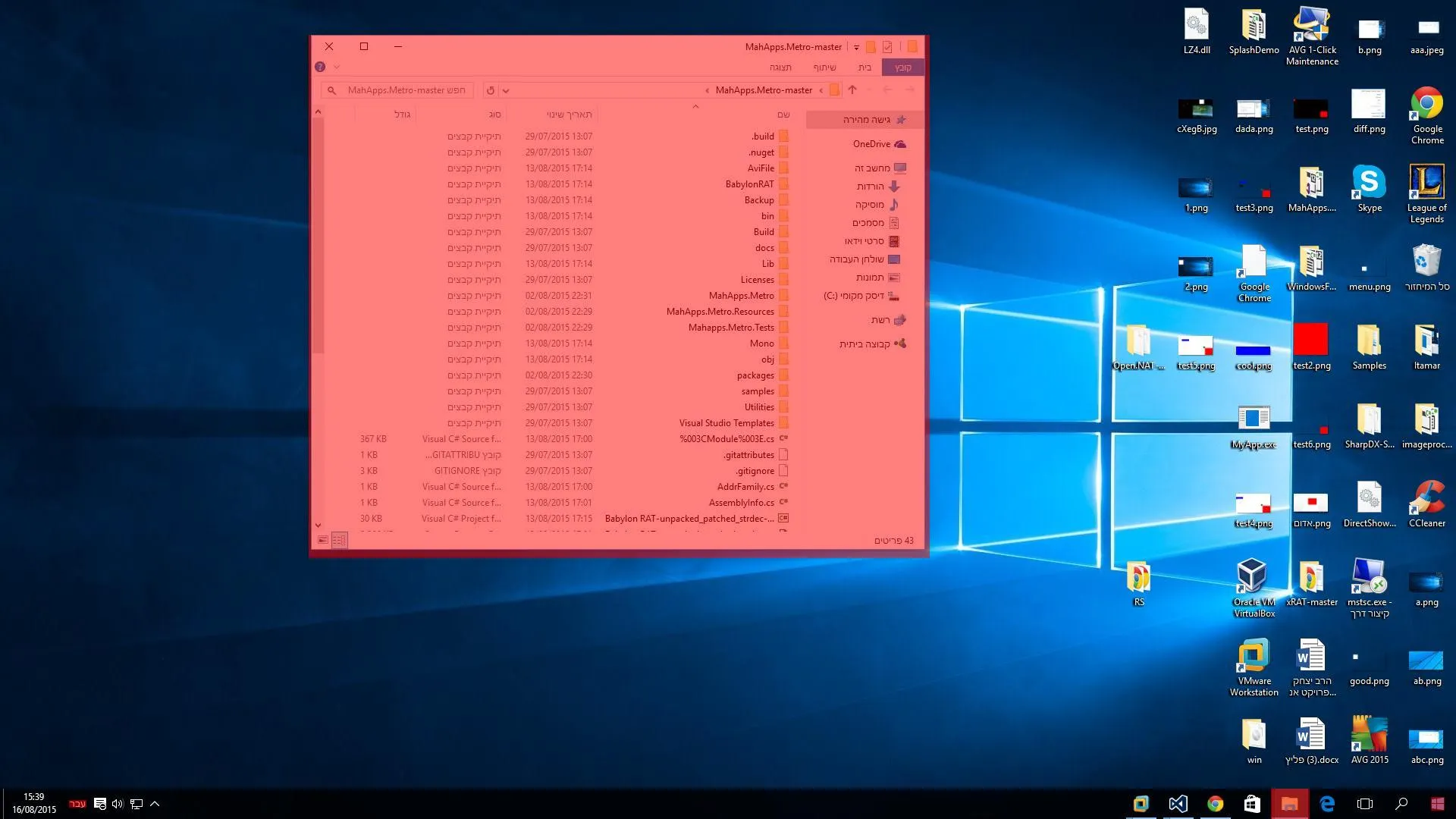
假设这些是图片: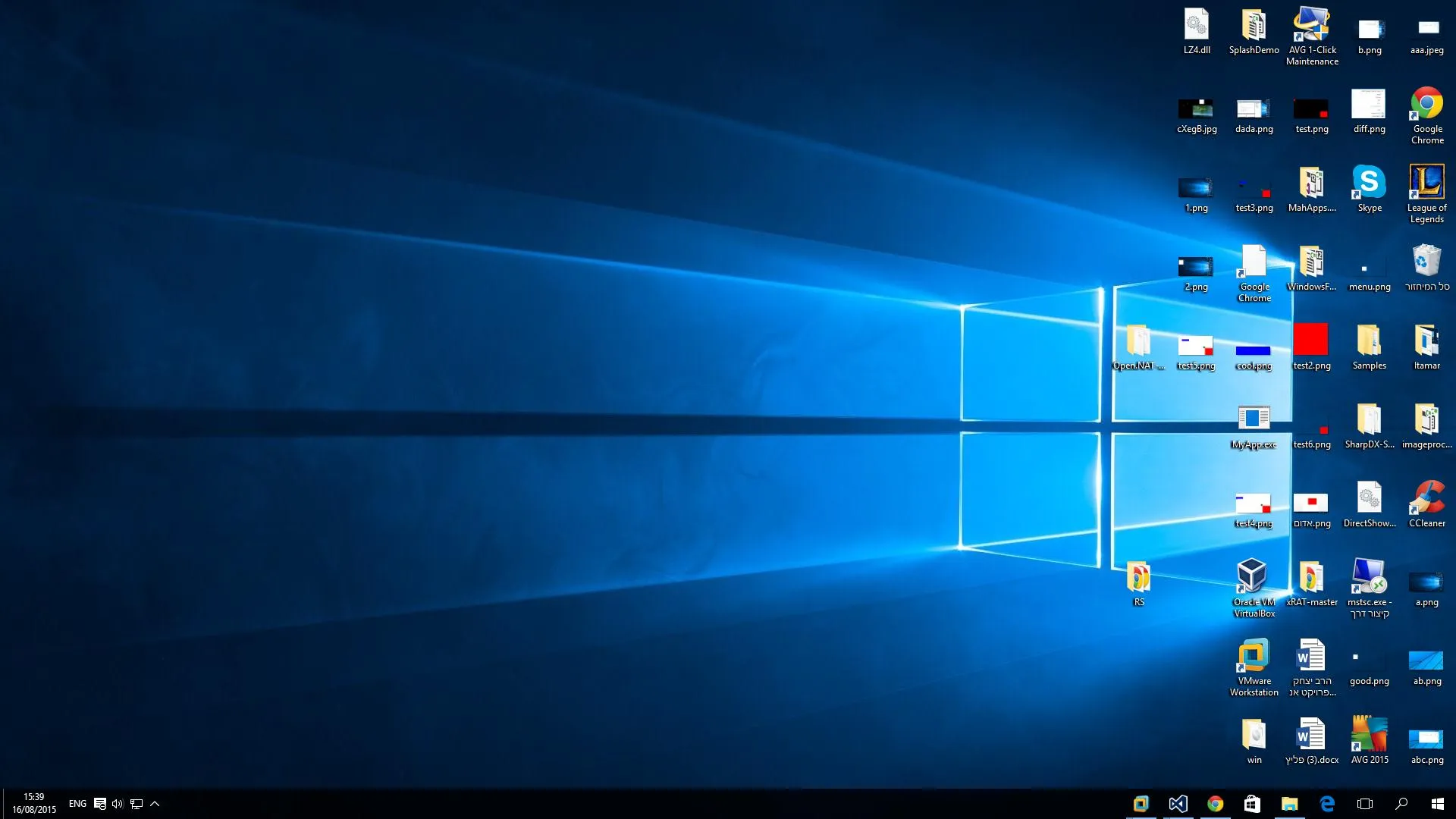 和
和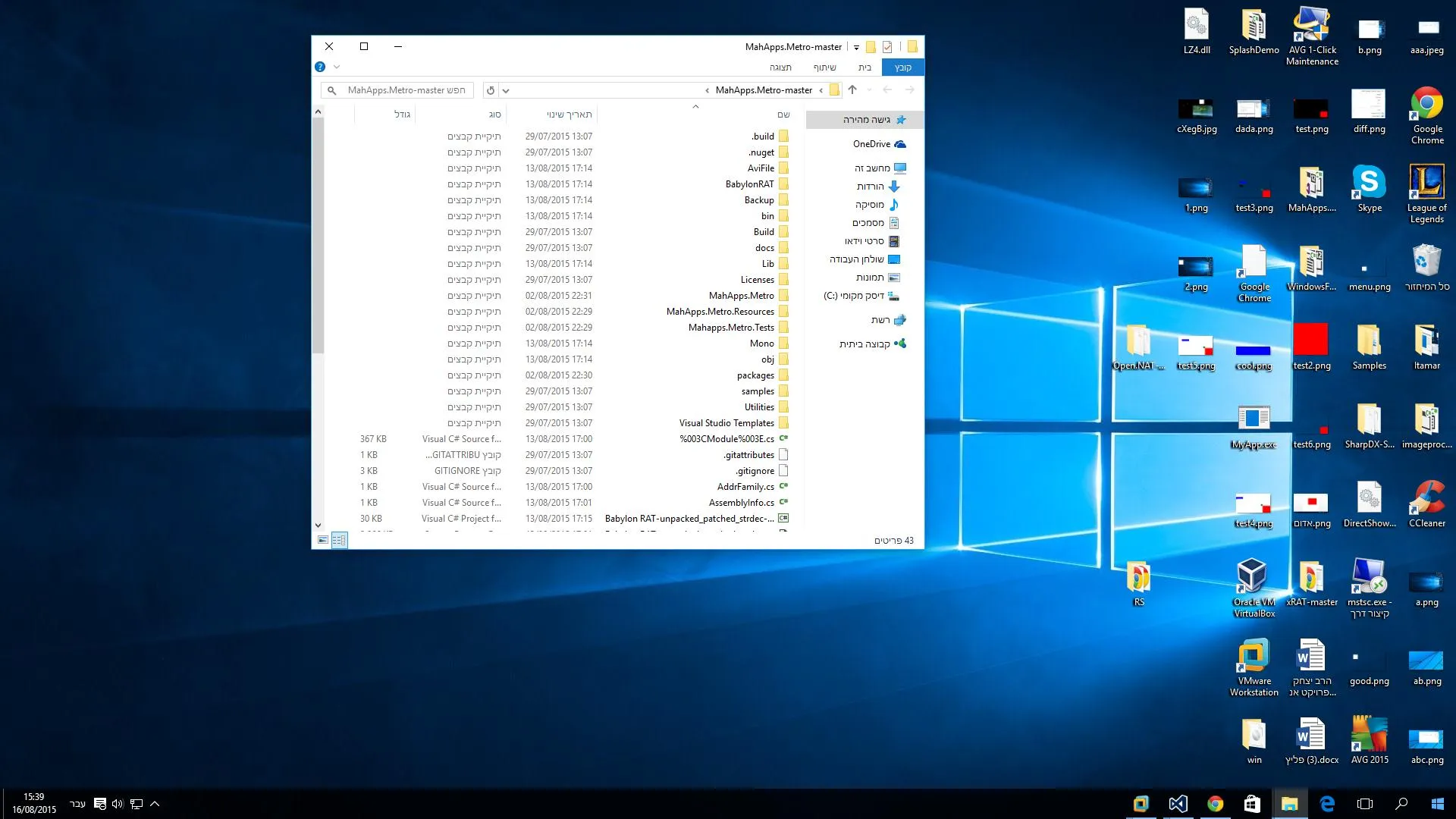
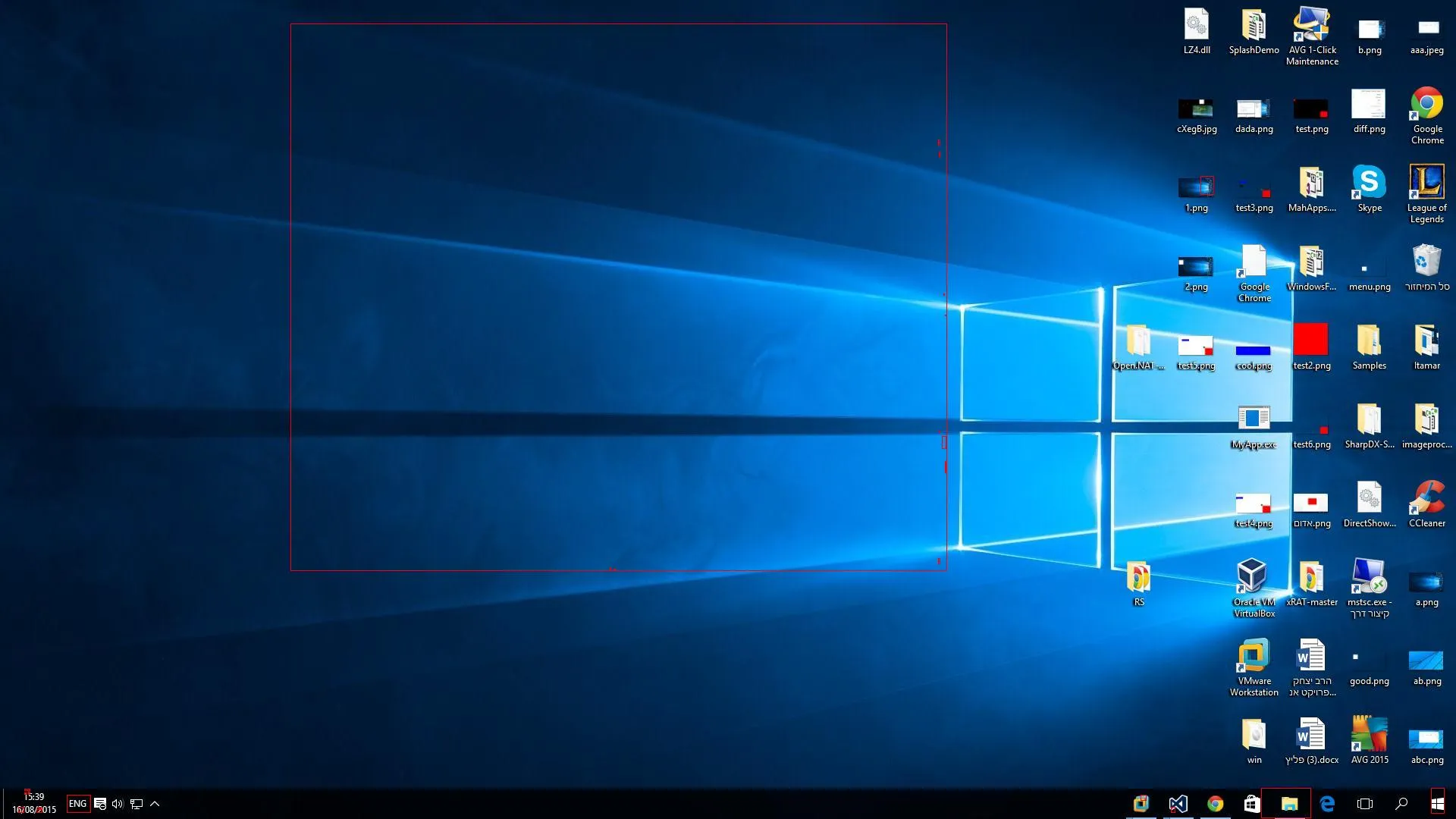
我想要获取不同的矩形边界(在这种情况下是打开的目录窗口)。
这是我已经做过的:
private unsafe List<Rectangle> CodeImage(Bitmap bmp, Bitmap bmp2)
{
List<Rectangle> rec = new List<Rectangle>();
bmData = bmp.LockBits(new System.Drawing.Rectangle(0, 0, 1920, 1080), System.Drawing.Imaging.ImageLockMode.ReadOnly, bmp.PixelFormat);
bmData2 = bmp2.LockBits(new System.Drawing.Rectangle(0, 0, 1920, 1080), System.Drawing.Imaging.ImageLockMode.ReadOnly, bmp2.PixelFormat);
IntPtr scan0 = bmData.Scan0;
IntPtr scan02 = bmData2.Scan0;
int stride = bmData.Stride;
int stride2 = bmData2.Stride;
int nWidth = bmp.Width;
int nHeight = bmp.Height;
int minX = int.MaxValue;;
int minY = int.MaxValue;
int maxX = 0;
bool found = false;
for (int y = 0; y < nHeight; y++)
{
byte* p = (byte*)scan0.ToPointer();
p += y * stride;
byte* p2 = (byte*)scan02.ToPointer();
p2 += y * stride2;
for (int x = 0; x < nWidth; x++)
{
if (p[0] != p2[0] || p[1] != p2[1] || p[2] != p2[2] || p[3] != p2[3]) //found differences-began to store positions.
{
found = true;
if (x < minX)
minX = x;
if (x > maxX)
maxX = x;
if (y < minY)
minY = y;
}
else
{
if (found)
{
int height = getBlockHeight(stride, scan0, maxX, minY, scan02, stride2);
found = false;
Rectangle temp = new Rectangle(minX, minY, maxX - minX, height);
rec.Add(temp);
//x += minX;
y += height;
minX = int.MaxValue;
minY = int.MaxValue;
maxX = 0;
}
}
p += 4;
p2 += 4;
}
}
return rec;
}
public unsafe int getBlockHeight(int stride, IntPtr scan, int x, int y1, IntPtr scan02, int stride2) //a function to get an existing block height.
{
int height = 0;;
for (int y = y1; y < 1080; y++) //only for example- in our case its 1080 height.
{
byte* p = (byte*)scan.ToPointer();
p += (y * stride) + (x * 4); //set the pointer to a specific potential point.
byte* p2 = (byte*)scan02.ToPointer();
p2 += (y * stride2) + (x * 4); //set the pointer to a specific potential point.
if (p[0] != p2[0] || p[1] != p2[1] || p[2] != p2[2] || p[3] != p2[3]) //still change on the height in the increasing **y** of the block.
height++;
}
return height;
}
这实际上是我调用该方法的方式:
Bitmap a = Image.FromFile(@"C:\Users\itapi\Desktop\1.png") as Bitmap;//generates a 32bppRgba bitmap;
Bitmap b = Image.FromFile(@"C:\Users\itapi\Desktop\2.png") as Bitmap;//
List<Rectangle> l1 = CodeImage(a, b);
int i = 0;
foreach (Rectangle rec in l1)
{
i++;
Bitmap tmp = b.Clone(rec, a.PixelFormat);
tmp.Save(i.ToString() + ".png");
}
但我没有得到精确的矩形...我只得到了一半甚至更差。我认为代码逻辑有问题。
@nico的代码:
private unsafe List<Rectangle> CodeImage(Bitmap bmp, Bitmap bmp2)
{
List<Rectangle> rec = new List<Rectangle>();
var bmData1 = bmp.LockBits(new System.Drawing.Rectangle(0, 0, bmp.Width, bmp.Height), System.Drawing.Imaging.ImageLockMode.ReadOnly, bmp.PixelFormat);
var bmData2 = bmp2.LockBits(new System.Drawing.Rectangle(0, 0, bmp.Width, bmp.Height), System.Drawing.Imaging.ImageLockMode.ReadOnly, bmp2.PixelFormat);
int bytesPerPixel = 3;
IntPtr scan01 = bmData1.Scan0;
IntPtr scan02 = bmData2.Scan0;
int stride1 = bmData1.Stride;
int stride2 = bmData2.Stride;
int nWidth = bmp.Width;
int nHeight = bmp.Height;
bool[] visited = new bool[nWidth * nHeight];
byte* base1 = (byte*)scan01.ToPointer();
byte* base2 = (byte*)scan02.ToPointer();
for (int y = 0; y < nHeight; y += 5)
{
byte* p1 = base1;
byte* p2 = base2;
for (int x = 0; x < nWidth; x += 5)
{
if (!ArePixelsEqual(p1, p2, bytesPerPixel) && !(visited[x + nWidth * y]))
{
// fill the different area
int minX = x;
int maxX = x;
int minY = y;
int maxY = y;
var pt = new Point(x, y);
Stack<Point> toBeProcessed = new Stack<Point> ();
visited[x + nWidth * y] = true;
toBeProcessed.Push(pt);
while (toBeProcessed.Count > 0)
{
var process = toBeProcessed.Pop();
var ptr1 = (byte*)scan01.ToPointer() + process.Y * stride1 + process.X * bytesPerPixel;
var ptr2 = (byte*) scan02.ToPointer() + process.Y * stride2 + process.X * bytesPerPixel;
//Check pixel equality
if (ArePixelsEqual(ptr1, ptr2, bytesPerPixel))
continue;
//This pixel is different
//Update the rectangle
if (process.X < minX) minX = process.X;
if (process.X > maxX) maxX = process.X;
if (process.Y < minY) minY = process.Y;
if (process.Y > maxY) maxY = process.Y;
Point n;
int idx;
//Put neighbors in stack
if (process.X - 1 >= 0)
{
n = new Point(process.X - 1, process.Y);
idx = n.X + nWidth * n.Y;
if (!visited[idx])
{
visited[idx] = true;
toBeProcessed.Push(n);
}
}
if (process.X + 1 < nWidth)
{
n = new Point(process.X + 1, process.Y);
idx = n.X + nWidth * n.Y;
if (!visited[idx])
{
visited[idx] = true;
toBeProcessed.Push(n);
}
}
if (process.Y - 1 >= 0)
{
n = new Point(process.X, process.Y - 1);
idx = n.X + nWidth * n.Y;
if (!visited[idx])
{
visited[idx] = true;
toBeProcessed.Push(n);
}
}
if (process.Y + 1 < nHeight)
{
n = new Point(process.X, process.Y + 1);
idx = n.X + nWidth * n.Y;
if (!visited[idx])
{
visited[idx] = true;
toBeProcessed.Push(n);
}
}
}
if (((maxX - minX + 1) > 5) & ((maxY - minY + 1) > 5))
rec.Add(new Rectangle(minX, minY, maxX - minX + 1, maxY - minY + 1));
}
p1 += 5 * bytesPerPixel;
p2 += 5 * bytesPerPixel;
}
base1 += 5 * stride1;
base2 += 5 * stride2;
}
bmp.UnlockBits(bmData1);
bmp2.UnlockBits(bmData2);
return rec;
}
if(found)块(因为它在检测的else分支中)。您难道不希望该块立即执行找到不匹配的像素吗? (如果您仍然在解决逻辑问题,请首先实现它而不使用整个步幅/扫描/像素字节,并使用GetPixel。获得最简单的可行解决方案,然后再进行性能优化。) - Chris Sinclairif块呢?我认为它确实进入了。因为在第一个不匹配时,我将found设置为True。 - Slashyelse代码块中。当你找到第一个匹配项时,你必须等待下一轮迭代才能进入它。另外(第二次查看时),你只会在上一次迭代中检测到不匹配并且当前像素与原像素不匹配的情况下才进入它。如果像素恰好是相同的颜色,则不会进入它。检查你的if/else分支逻辑,并确保它对你的目的正确。 - Chris Sinclair