我有两张大小相同的图片。最好的方法是找到它们不同之处所在的矩形区域。显然,我可以以不同的方向4次遍历图像,但我想知道是否有更简单的方法。

var diff = new ImageDiffUtil(filename1, filename2);
var diffRectangles = diff.GetDiffRectangles(int.MaxValue);
var diff = new ImageDiffUtil(filename1, filename2);
var diffRectangles = diff.GetDiffRectangles(8);
ImageDiffUtil.cs
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
namespace diff_images
{
public class ImageDiffUtil
{
Bitmap image1;
Bitmap image2;
public ImageDiffUtil(string filename1, string filename2)
{
image1 = Image.FromFile(filename1) as Bitmap;
image2 = Image.FromFile(filename2) as Bitmap;
}
public IList<Point> GetDiffPixels()
{
var widthRange = Enumerable.Range(0, image1.Width);
var heightRange = Enumerable.Range(0, image1.Height);
var result = widthRange
.SelectMany(x => heightRange, (x, y) => new Point(x, y))
.Select(point => new
{
Point = point,
Pixel1 = image1.GetPixel(point.X, point.Y),
Pixel2 = image2.GetPixel(point.X, point.Y)
})
.Where(pair => pair.Pixel1 != pair.Pixel2)
.Select(pair => pair.Point)
.ToList();
return result;
}
public IEnumerable<Rectangle> GetDiffRectangles(double distanceThreshold)
{
var result = new List<Rectangle>();
var differentPixels = GetDiffPixels();
while (differentPixels.Count > 0)
{
var cluster = new List<Point>()
{
differentPixels[0]
};
differentPixels.RemoveAt(0);
while (true)
{
var left = cluster.Min(p => p.X);
var right = cluster.Max(p => p.X);
var top = cluster.Min(p => p.Y);
var bottom = cluster.Max(p => p.Y);
var width = Math.Max(right - left, 1);
var height = Math.Max(bottom - top, 1);
var clusterBox = new Rectangle(left, top, width, height);
var proximal = differentPixels
.Where(point => GetDistance(clusterBox, point) <= distanceThreshold)
.ToList();
proximal.ForEach(point => differentPixels.Remove(point));
if (proximal.Count == 0)
{
result.Add(clusterBox);
break;
}
else
{
cluster.AddRange(proximal);
}
};
}
return result;
}
static double GetDistance(Rectangle rect, Point p)
{
var dx = Math.Max(rect.Left - p.X, 0);
dx = Math.Max(dx, p.X - rect.Right);
var dy = Math.Max(rect.Top - p.Y, 0);
dy = Math.Max(dy, p.Y - rect.Bottom);
return Math.Sqrt(dx * dx + dy * dy);
}
}
}
Form1.cs
using System.Drawing;
using System.Linq;
using System.Windows.Forms;
namespace diff_images
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
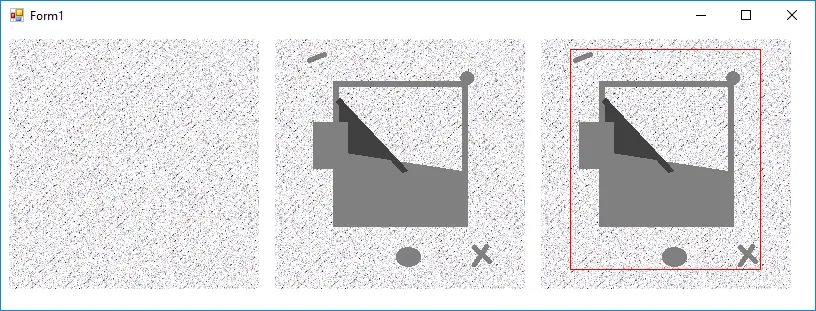
var filename1 = @"Gelatin1.PNG";
var filename2 = @"Gelatin2.PNG";
var diff = new ImageDiffUtil(filename1, filename2);
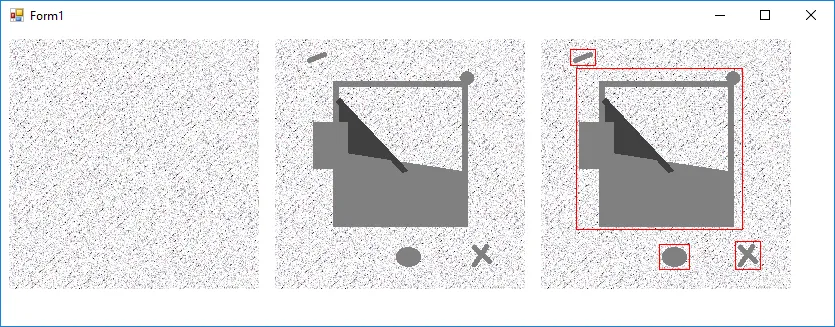
var diffRectangles = diff.GetDiffRectangles(8);
var img3 = Image.FromFile(filename2);
Pen redPen = new Pen(Color.Red, 1);
var padding = 3;
using (var graphics = Graphics.FromImage(img3))
{
diffRectangles
.ToList()
.ForEach(rect =>
{
var largerRect = new Rectangle(rect.X - padding, rect.Y - padding, rect.Width + padding * 2, rect.Height + padding * 2);
graphics.DrawRectangle(redPen, largerRect);
});
}
var pb1 = new PictureBox()
{
Image = Image.FromFile(filename1),
Left = 8,
Top = 8,
SizeMode = PictureBoxSizeMode.AutoSize
};
var pb2 = new PictureBox()
{
Image = Image.FromFile(filename2),
Left = pb1.Left + pb1.Width + 16,
Top = 8,
SizeMode = PictureBoxSizeMode.AutoSize
};
var pb3 = new PictureBox()
{
Image = img3,
Left = pb2.Left + pb2.Width + 16,
Top = 8,
SizeMode = PictureBoxSizeMode.AutoSize
};
Controls.Add(pb1);
Controls.Add(pb2);
Controls.Add(pb3);
}
}
}
我认为没有更简单的方法。
实际上,这只需要(非常)少量的代码,所以除非你找到一个可以直接为你完成这个任务的库,否则你不会找到更短的方法。
想法:
将图像视为一个二维数组,其中每个数组元素都是图像的像素。因此,我认为图像差异只是二维数组差异。
想法就是仅仅通过扫描数组元素的宽度,找到像素值存在差异的位置。如果两个二维数组的[x,y]坐标不同,则启动我们的矩形查找逻辑。随后,这些矩形将用于修补最后更新的帧缓冲区。
我们需要扫描矩形的边界以查找差异,如果在矩形的边界上发现任何差异,则根据所进行的扫描类型增加宽度或高度。
例如:如果我沿着二维数组的宽度进行扫描,并发现存在一个坐标在两个二维数组中不同的位置,则我将创建一个矩形,其起始位置为[x-1,y-1],宽度和高度分别为2和2。请注意,宽度和高度指的是像素数。
例如:矩形信息: X = 20 Y = 35 W = 26 H = 23
例如,矩形的宽度从坐标[20, 35]开始-> [20, 35 + 26-1]。也许当您找到代码时,您可能能够更好地理解它。
此外,您找到的大矩形内部可能会有较小的矩形,因此我们需要从参考中删除这些较小的矩形,因为它们对我们来说毫无意义,除了占用我宝贵的空间!
上述逻辑在VNC服务器实现的情况下将非常有用,因为需要矩形来表示当前拍摄的图像中的差异。这些矩形可以通过网络发送到VNC客户端,后者可以将矩形打补丁到其所拥有的本地帧缓冲区的矩形上,从而在VNC客户端显示板上显示它。
P.S.:
我将附上我实现自己算法的代码。我请求观众指出任何错误或性能调整。我还请求观众评论是否有更好的算法可以使生活更简单。
代码:
类矩形:
public class Rect {
public int x; // Array Index
public int y; // Array Index
public int w; // Number of hops along the Horizontal
public int h; // Number of hops along the Vertical
@Override
public boolean equals(Object obj) {
Rect rect = (Rect) obj;
if(rect.x == this.x && rect.y == this.y && rect.w == this.w && rect.h == this.h) {
return true;
}
return false;
}
}
图像差异类:
import java.awt.image.BufferedImage;
import java.io.File;
import java.io.IOException;
import java.util.LinkedList;
import javax.imageio.ImageIO;
public class ImageDifference {
long start = 0, end = 0;
public LinkedList<Rect> differenceImage(int[][] baseFrame, int[][] screenShot, int xOffset, int yOffset, int width, int height) {
// Code starts here
int xRover = 0;
int yRover = 0;
int index = 0;
int limit = 0;
int rover = 0;
boolean isRectChanged = false;
boolean shouldSkip = false;
LinkedList<Rect> rectangles = new LinkedList<Rect>();
Rect rect = null;
start = System.nanoTime();
// xRover - Rovers over the height of 2D Array
// yRover - Rovers over the width of 2D Array
int verticalLimit = xOffset + height;
int horizontalLimit = yOffset + width;
for(xRover = xOffset; xRover < verticalLimit; xRover += 1) {
for(yRover = yOffset; yRover < horizontalLimit; yRover += 1) {
if(baseFrame[xRover][yRover] != screenShot[xRover][yRover]) {
// Skip over the already processed Rectangles
for(Rect itrRect : rectangles) {
if(( (xRover < itrRect.x + itrRect.h) && (xRover >= itrRect.x) ) && ( (yRover < itrRect.y + itrRect.w) && (yRover >= itrRect.y) )) {
shouldSkip = true;
yRover = itrRect.y + itrRect.w - 1;
break;
} // End if(( (xRover < itrRect.x + itrRect.h) && (xRover >= itrRect.x) ) && ( (yRover < itrRect.y + itrRect.w) && (yRover >= itrRect.y) ))
} // End for(Rect itrRect : rectangles)
if(shouldSkip) {
shouldSkip = false;
// Need to come out of the if condition as below that is why "continue" has been provided
// if(( (xRover <= (itrRect.x + itrRect.h)) && (xRover >= itrRect.x) ) && ( (yRover <= (itrRect.y + itrRect.w)) && (yRover >= itrRect.y) ))
continue;
} // End if(shouldSkip)
rect = new Rect();
rect.x = ((xRover - 1) < xOffset) ? xOffset : (xRover - 1);
rect.y = ((yRover - 1) < yOffset) ? yOffset : (yRover - 1);
rect.w = 2;
rect.h = 2;
/* Boolean variable used to re-scan the currently found rectangle
for any change due to previous scanning of boundaries */
isRectChanged = true;
while(isRectChanged) {
isRectChanged = false;
index = 0;
/* I */
/* Scanning of left-side boundary of rectangle */
index = rect.x;
limit = rect.x + rect.h;
while(index < limit && rect.y != yOffset) {
if(baseFrame[index][rect.y] != screenShot[index][rect.y]) {
isRectChanged = true;
rect.y = rect.y - 1;
rect.w = rect.w + 1;
index = rect.x;
continue;
} // End if(baseFrame[index][rect.y] != screenShot[index][rect.y])
index = index + 1;;
} // End while(index < limit && rect.y != yOffset)
/* II */
/* Scanning of bottom boundary of rectangle */
index = rect.y;
limit = rect.y + rect.w;
while( (index < limit) && (rect.x + rect.h != verticalLimit) ) {
rover = rect.x + rect.h - 1;
if(baseFrame[rover][index] != screenShot[rover][index]) {
isRectChanged = true;
rect.h = rect.h + 1;
index = rect.y;
continue;
} // End if(baseFrame[rover][index] != screenShot[rover][index])
index = index + 1;
} // End while( (index < limit) && (rect.x + rect.h != verticalLimit) )
/* III */
/* Scanning of right-side boundary of rectangle */
index = rect.x;
limit = rect.x + rect.h;
while( (index < limit) && (rect.y + rect.w != horizontalLimit) ) {
rover = rect.y + rect.w - 1;
if(baseFrame[index][rover] != screenShot[index][rover]) {
isRectChanged = true;
rect.w = rect.w + 1;
index = rect.x;
continue;
} // End if(baseFrame[index][rover] != screenShot[index][rover])
index = index + 1;
} // End while( (index < limit) && (rect.y + rect.w != horizontalLimit) )
} // while(isRectChanged)
// Remove those rectangles that come inside "rect" rectangle.
int idx = 0;
while(idx < rectangles.size()) {
Rect r = rectangles.get(idx);
if( ( (rect.x <= r.x) && (rect.x + rect.h >= r.x + r.h) ) && ( (rect.y <= r.y) && (rect.y + rect.w >= r.y + r.w) ) ) {
rectangles.remove(r);
} else {
idx += 1;
} // End if( ( (rect.x <= r.x) && (rect.x + rect.h >= r.x + r.h) ) && ( (rect.y <= r.y) && (rect.y + rect.w >= r.y + r.w) ) )
} // End while(idx < rectangles.size())
// Giving a head start to the yRover when a rectangle is found
rectangles.addFirst(rect);
yRover = rect.y + rect.w - 1;
rect = null;
} // End if(baseFrame[xRover][yRover] != screenShot[xRover][yRover])
} // End for(yRover = yOffset; yRover < horizontalLimit; yRover += 1)
} // End for(xRover = xOffset; xRover < verticalLimit; xRover += 1)
end = System.nanoTime();
return rectangles;
}
public static void main(String[] args) throws IOException {
LinkedList<Rect> rectangles = null;
// Buffering the Base image and Screen Shot Image
BufferedImage screenShotImg = ImageIO.read(new File("screenShotImg.png"));
BufferedImage baseImg = ImageIO.read(new File("baseImg.png"));
int width = baseImg.getWidth();
int height = baseImg.getHeight();
int xOffset = 0;
int yOffset = 0;
int length = baseImg.getWidth() * baseImg.getHeight();
// Creating 2 Two Dimensional Arrays for Image Processing
int[][] baseFrame = new int[height][width];
int[][] screenShot = new int[height][width];
// Creating 2 Single Dimensional Arrays to retrieve the Pixel Values
int[] baseImgPix = new int[length];
int[] screenShotImgPix = new int[length];
// Reading the Pixels from the Buffered Image
baseImg.getRGB(0, 0, baseImg.getWidth(), baseImg.getHeight(), baseImgPix, 0, baseImg.getWidth());
screenShotImg.getRGB(0, 0, screenShotImg.getWidth(), screenShotImg.getHeight(), screenShotImgPix, 0, screenShotImg.getWidth());
// Transporting the Single Dimensional Arrays to Two Dimensional Array
long start = System.nanoTime();
for(int row = 0; row < height; row++) {
System.arraycopy(baseImgPix, (row * width), baseFrame[row], 0, width);
System.arraycopy(screenShotImgPix, (row * width), screenShot[row], 0, width);
}
long end = System.nanoTime();
System.out.println("Array Copy : " + ((double)(end - start) / 1000000));
// Finding Differences between the Base Image and ScreenShot Image
ImageDifference imDiff = new ImageDifference();
rectangles = imDiff.differenceImage(baseFrame, screenShot, xOffset, yOffset, width, height);
// Displaying the rectangles found
int index = 0;
for(Rect rect : rectangles) {
System.out.println("\nRect info : " + (++index));
System.out.println("X : " + rect.x);
System.out.println("Y : " + rect.y);
System.out.println("W : " + rect.w);
System.out.println("H : " + rect.h);
// Creating Bounding Box
for(int i = rect.y; i < rect.y + rect.w; i++) {
screenShotImgPix[ ( rect.x * width) + i ] = 0xFFFF0000;
screenShotImgPix[ ((rect.x + rect.h - 1) * width) + i ] = 0xFFFF0000;
}
for(int j = rect.x; j < rect.x + rect.h; j++) {
screenShotImgPix[ (j * width) + rect.y ] = 0xFFFF0000;
screenShotImgPix[ (j * width) + (rect.y + rect.w - 1) ] = 0xFFFF0000;
}
}
// Creating the Resultant Image
screenShotImg.setRGB(0, 0, width, height, screenShotImgPix, 0, width);
ImageIO.write(screenShotImg, "PNG", new File("result.png"));
double d = ((double)(imDiff.end - imDiff.start) / 1000000);
System.out.println("\nTotal Time : " + d + " ms" + " Array Copy : " + ((double)(end - start) / 1000000) + " ms");
}
}
描述:
将会有一个名为的函数
public LinkedList<Rect> differenceImage(int[][] baseFrame, int[][] screenShot, int width, int height)
这段代码的功能是找出两张图片之间的差异,并返回一个对象的链表,这些对象就是矩形。
主函数会测试这个算法。
主函数中传入了两张样例图片,它们分别是“baseFrame”和“screenShot”,从而生成了结果图片“result”。
我没有足够的声望来发布结果图片,但它会很有趣。
这篇博客将提供输出Image Difference。
如果你知道如何使用Lockbit,那么这里就有一个简单的方法 :)
Bitmap originalBMP = new Bitmap(pictureBox1.ImageLocation);
Bitmap changedBMP = new Bitmap(pictureBox2.ImageLocation);
int width = Math.Min(originalBMP.Width, changedBMP.Width),
height = Math.Min(originalBMP.Height, changedBMP.Height),
xMin = int.MaxValue,
xMax = int.MinValue,
yMin = int.MaxValue,
yMax = int.MinValue;
var originalLock = originalBMP.LockBits(new Rectangle(0, 0, width, height), ImageLockMode.ReadWrite, originalBMP.PixelFormat);
var changedLock = changedBMP.LockBits(new Rectangle(0, 0, width, height), ImageLockMode.ReadWrite, changedBMP.PixelFormat);
for (int y = 0; y < height; y++)
{
for (int x = 0; x < width; x++)
{
//generate the address of the colour pixel
int pixelIdxOrg = y * originalLock.Stride + (x * 4);
int pixelIdxCh = y * changedLock.Stride + (x * 4);
if (( Marshal.ReadByte(originalLock.Scan0, pixelIdxOrg + 2)!= Marshal.ReadByte(changedLock.Scan0, pixelIdxCh + 2))
|| (Marshal.ReadByte(originalLock.Scan0, pixelIdxOrg + 1) != Marshal.ReadByte(changedLock.Scan0, pixelIdxCh + 1))
|| (Marshal.ReadByte(originalLock.Scan0, pixelIdxOrg) != Marshal.ReadByte(changedLock.Scan0, pixelIdxCh))
)
{
xMin = Math.Min(xMin, x);
xMax = Math.Max(xMax, x);
yMin = Math.Min(yMin, y);
yMax = Math.Max(yMax, y);
}
}
}
originalBMP.UnlockBits(originalLock);
changedBMP.UnlockBits(changedLock);
var result = changedBMP.Clone(new Rectangle(xMin, yMin, xMax - xMin, yMax - yMin), changedBMP.PixelFormat);
pictureBox3.Image = result;
我认为,在每个方向上彻底搜索第一个不同点是最好的方法,除非你知道某个事实以某种方式限制了不同点的集合。