我已经发现了很多关于使用OpenCV进行图像拼接和变形的问题和答案,但我仍然找不到我的问题的答案。
我有两个鱼眼相机,成功地对其进行了校准,因此两个图像中的畸变都被消除了。
现在我想将这些矫正的图像拼接在一起。所以我基本上按照这个例子做,这个例子也在很多其他的拼接问题中提到: 图像拼接示例
所以我做了Keypoint和Descriptor检测。我找到了匹配项,也获得了Homography矩阵,因此我可以变形其中一个图像,这给我带来了一个非常拉伸的图像作为结果。另一个图像保持不变。我想避免拉伸。所以我在这里找到了一个不错的解决方案: 拉伸解决方案。
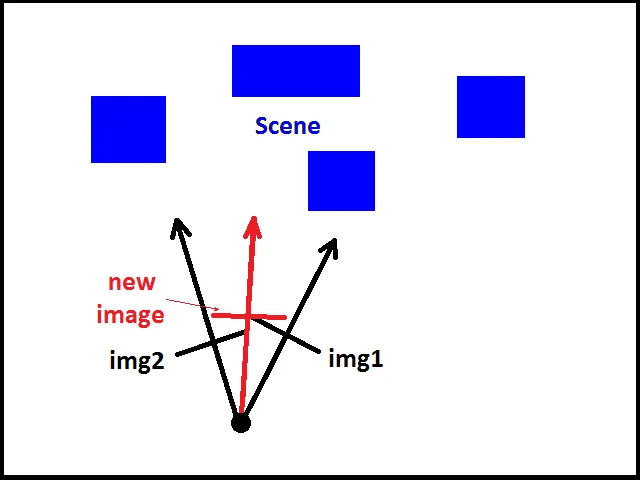
在第7页上,您可以看到两个图像都被变形了。我认为这将减少一个图像的拉伸(在我看来,拉伸将分开,例如50:50)。如果我错了,请告诉我。
我遇到的问题是,我不知道如何变形两个图像使它们拟合。我需要计算两个Homografies吗?我需要定义一个参考平面,比如Rect()之类的东西吗?如何实现类似第7页所示的变形结果呢?
为了让它更清楚,我并没有在TU Dresden学习,所以这只是我在研究中发现的东西。