如何从平面图的边界列表或邻接列表表示转换为面列表?
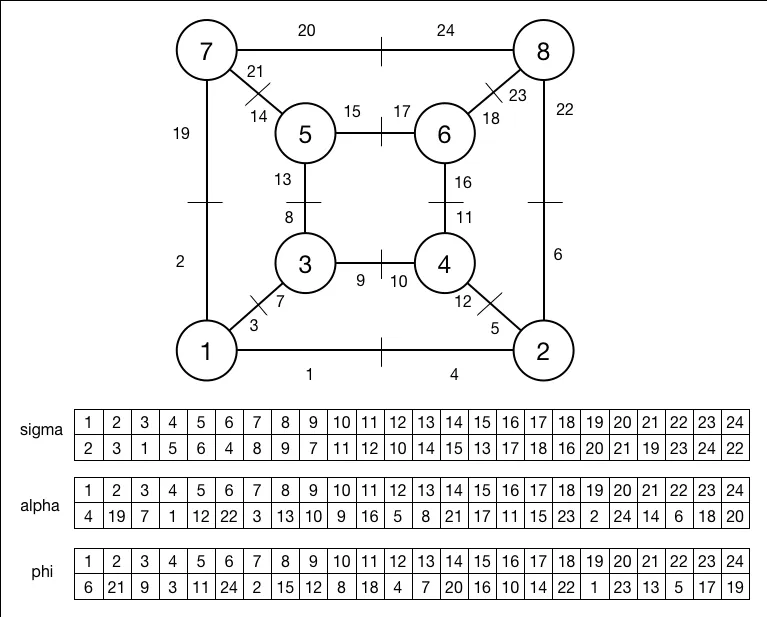
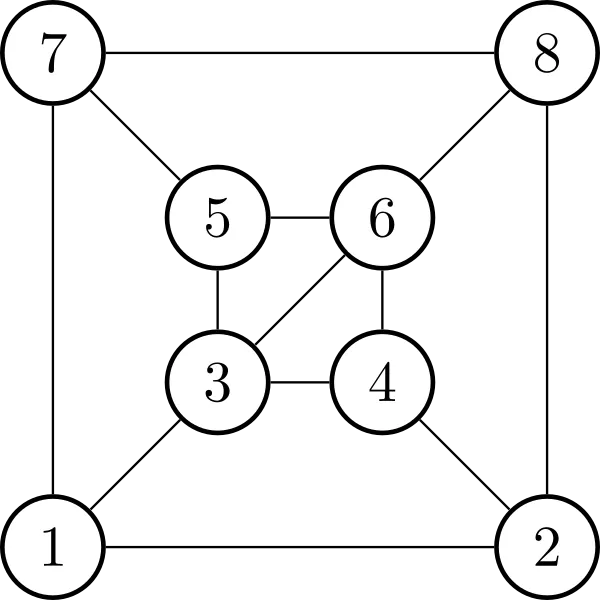
例如,对于这个图(奇怪的是它不是0索引):
例如,对于这个图(奇怪的是它不是0索引):
我想要一个看起来像这样的列表:
[
[1,2,8,7],
[1,2,4,3],
[1,3,5,7],
[2,4,6,8],
[5,6,7,8],
[3,4,6],
[3,5,6]
]
它不必采用那种格式或顺序,但应该是一种列出所有面孔的列表(或集合)。外部面孔也包括在内。
对于一个具有V个顶点的图形(因为是平面图,E=O(V)),该算法应该在O(V)内生成此列表。