我有一个向量,由一个点、速度和方向组成。我们称这个向量为R。还有另一个只由一个点和速度组成,没有方向的向量。我们称这个向量为T。
现在,我想要找到这两个向量的最短交点。由于T没有方向,这证明是困难的。我能够在CaRMetal中创建一个有效的公式,但我不能在Python中使其工作。
有人能建议一个更有效的方法来解决这个问题吗?或者解决我的现有公式X?
公式: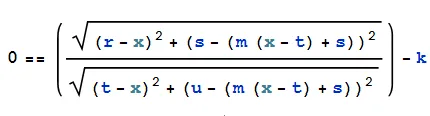
(来源: bja888.com)
关键字:
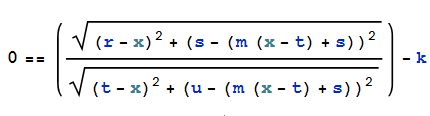
公式:
(来源: bja888.com)
{kind=link}
关键字:
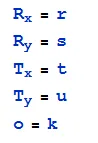
(来源: bja888.com)
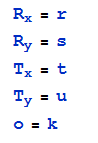{kind=link}
其中o或k表示向量之间的速度差。R.speed / T.speed