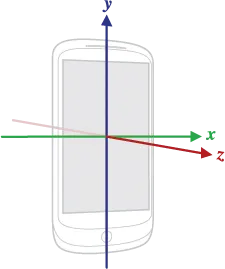
我想要实现的是一种位置的“磁指纹”。我使用磁场传感器,在事件中获取3个值,分别对应(不幸的是没有进一步解释的)X、Y和Z轴。
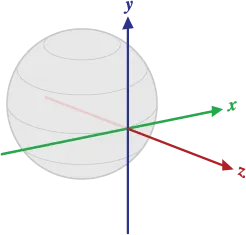
问题在于,当我旋转设备时,这些值会改变,所以我猜测这3个轴相对于设备。我需要补偿设备旋转,以便获得相同的3个值,无论设备如何旋转。
我尝试过用旋转矩阵(我知道如何获得它)相乘,尝试过用倾斜矩阵相乘等等,但什么都不起作用。无论我尝试什么,设备旋转时值仍然会改变。
那么有人知道如何正确地做吗?最好附带代码,因为我读到了很多类似“那么你就必须使用旋转矩阵来进行补偿”的东西,但没有找到一个具体的、可行的例子。
问题在于,当我旋转设备时,这些值会改变,所以我猜测这3个轴相对于设备。我需要补偿设备旋转,以便获得相同的3个值,无论设备如何旋转。
我尝试过用旋转矩阵(我知道如何获得它)相乘,尝试过用倾斜矩阵相乘等等,但什么都不起作用。无论我尝试什么,设备旋转时值仍然会改变。
那么有人知道如何正确地做吗?最好附带代码,因为我读到了很多类似“那么你就必须使用旋转矩阵来进行补偿”的东西,但没有找到一个具体的、可行的例子。