给出一张带有正权边的图、一对节点和它们之间的路径,想要找到一种最佳算法,该算法可以告诉我如何修改图的边权重,使得指定的路径尽可能地成为A*算法计算的节点间的最短路径。当然,如果我将最短路径作为输入,输出将是“不做任何更改”。
注意:最小程度指的是对边权进行的总更改。例如,另一个极端情况是将未在指定路径上的所有边的权重更改为无穷大,而沿着路径的权重更改为零。
注意:最小程度指的是对边权进行的总更改。例如,另一个极端情况是将未在指定路径上的所有边的权重更改为无穷大,而沿着路径的权重更改为零。
i = 0):
i步的成本,我们称之为c(p_0...p_i)。c(S),以及它的前i个组件的成本,我们用c(s_0...s_i)表示。w(p_n)减少c(p_0...p_i) - c(s_0...s_i) - epsilon,其中epsilon是一些接近于零的常数,您希望路径小于c(S)。i增加1。如果epsilon为0,则P = S。否则,你应该不超过理想更新的epsilon * |P|减少。
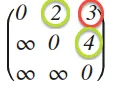
c(s_0...s_i+1),从c(s_0...s_i)中推导出来,但是这留给读者自己思考。;-)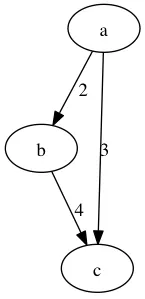 让路径为a-> b-> c。 Floyd-Warshall算法将计算以下矩阵。
让路径为a-> b-> c。 Floyd-Warshall算法将计算以下矩阵。