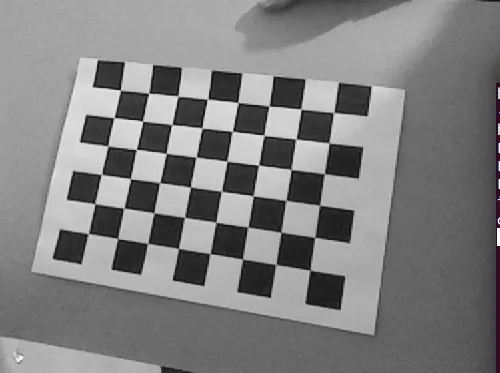
我试图校准我的相机。 我运行了一些示例,但它们都找不到棋盘的角落。 最后,我使用这个问题中的代码,但它仍然无法找到角落。下面是一张图片,我用它来寻找角落。
我在网上找到了一个解决此问题的命令。 它说board_sz必须包含内部角的数量,而不是方块的数量。 board_sz是一个二维对象。除了h*w之外,我不明白如何使用它来保存内部角落的数量。
我已经给出了w = 9,h = 7。
编辑1 ** ** 代码:
#include <cv.h>
#include <highgui.h>
#include <vector>
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
using namespace std;
int main()
{
int numBoards = 0;
int numCornersHor;
int numCornersVer;
printf("Enter number of corners along width: ");
scanf("%d", &numCornersHor);
printf("Enter number of corners along height: ");
scanf("%d", &numCornersVer);
printf("Enter number of boards: ");
scanf("%d", &numBoards);
int numSquares = numCornersHor * numCornersVer;
Size board_sz = Size(numCornersHor, numCornersVer);
VideoCapture capture = VideoCapture(0);
vector<vector<Point3d>> object_points;
vector<vector<Point2d>> image_points;
vector<Point2d> corners;
int successes=0;
Mat image;
Mat gray_image;
capture >> image;
vector<Point3d> obj;
for(int j=0;j<numSquares;j++)
obj.push_back(Point3d(j/numCornersHor, j%numCornersHor, 0.0f));
while(successes<numBoards)
{
cvtColor(image, gray_image, CV_BGR2GRAY);
bool found = findChessboardCorners(image, board_sz, corners, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
if(found)
{
cornerSubPix(gray_image, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
drawChessboardCorners(gray_image, board_sz, corners, found);
}
imshow("win1", image);
imshow("win2", gray_image);
capture >> image;
int key = waitKey(1);
if(key==27)
return 0;
if(key==' ' && found!=0)
{
image_points.push_back(corners);
object_points.push_back(obj);
printf("Snap stored!\n");
successes++;
if(successes>=numBoards)
break;
}
}
Mat intrinsic = Mat(3, 3, CV_32FC1);
Mat distCoeffs;
vector<Mat> rvecs;
vector<Mat> tvecs;
intrinsic.ptr<float>(0)[0] = 1;
intrinsic.ptr<float>(1)[1] = 1;
calibrateCamera(object_points, image_points, image.size(), intrinsic, distCoeffs, rvecs, tvecs);
Mat imageUndistorted;
while(1)
{
capture >> image;
undistort(image, imageUndistorted, intrinsic, distCoeffs);
imshow("win1", image);
imshow("win2", imageUndistorted);
waitKey(1);
}
capture.release();
return 0;
}
图片: