我需要一个最短路径算法来控制现实生活中的机器人。
假设我有一个环境地图,它以矩阵的形式存在,其中1表示障碍物,0表示自由空间。如果我使用传统的最短路径算法,比如A*算法,那么它会给出曼哈顿距离最短的路径。所以这个路径并不接近实际的最短路径。这个问题的原因在于我无法想到一种方法来惩罚移动,使得对角线比两条直线更好。我可以制定一种启发式算法,让A*首先尝试两点之间的欧几里得最短路径,但并不会使欧几里得最短路径成为更好的路径。
有没有人知道一种方法来获取连续空间的最短路径?它不一定是实际的最优路径,但比直线和90度角更好。
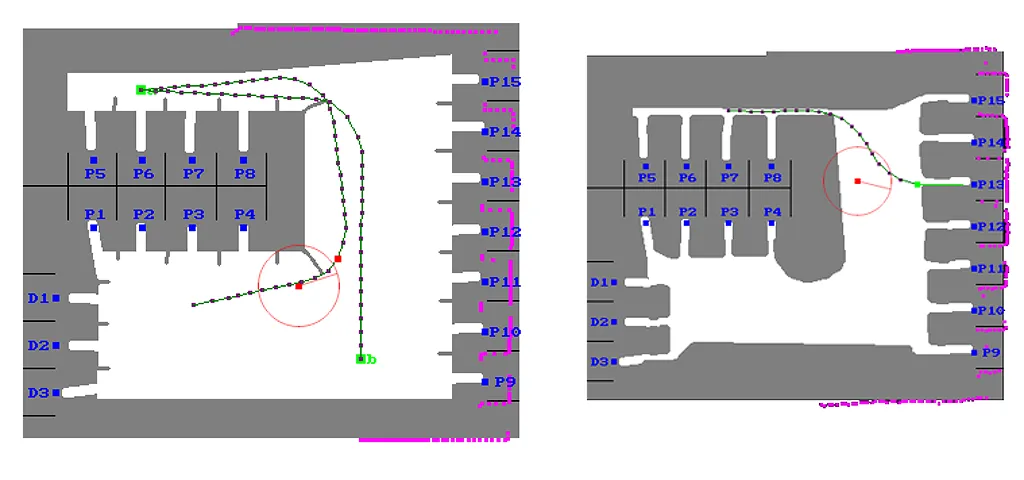
我有一个想法: 从起点开始画一个圆。 增加圆的半径,直到圆上的一个点靠近墙或到达目标。圆边上的所有点都设置为子节点,并带有圆的半径作为惩罚。圆内部的所有点,如果不开放,则将关闭,因为没有理由测试它们。按照欧几里得最短路径作为启发式,以A*方式重复此过程,直到达到目标状态。让机器人从一个点向下一个点直线运动。
这应该会给出更接近我所寻找的东西。一组具有不同角度的直线。当然,连续的曲线会更好...
假设我有一个环境地图,它以矩阵的形式存在,其中1表示障碍物,0表示自由空间。如果我使用传统的最短路径算法,比如A*算法,那么它会给出曼哈顿距离最短的路径。所以这个路径并不接近实际的最短路径。这个问题的原因在于我无法想到一种方法来惩罚移动,使得对角线比两条直线更好。我可以制定一种启发式算法,让A*首先尝试两点之间的欧几里得最短路径,但并不会使欧几里得最短路径成为更好的路径。
有没有人知道一种方法来获取连续空间的最短路径?它不一定是实际的最优路径,但比直线和90度角更好。
我有一个想法: 从起点开始画一个圆。 增加圆的半径,直到圆上的一个点靠近墙或到达目标。圆边上的所有点都设置为子节点,并带有圆的半径作为惩罚。圆内部的所有点,如果不开放,则将关闭,因为没有理由测试它们。按照欧几里得最短路径作为启发式,以A*方式重复此过程,直到达到目标状态。让机器人从一个点向下一个点直线运动。
这应该会给出更接近我所寻找的东西。一组具有不同角度的直线。当然,连续的曲线会更好...
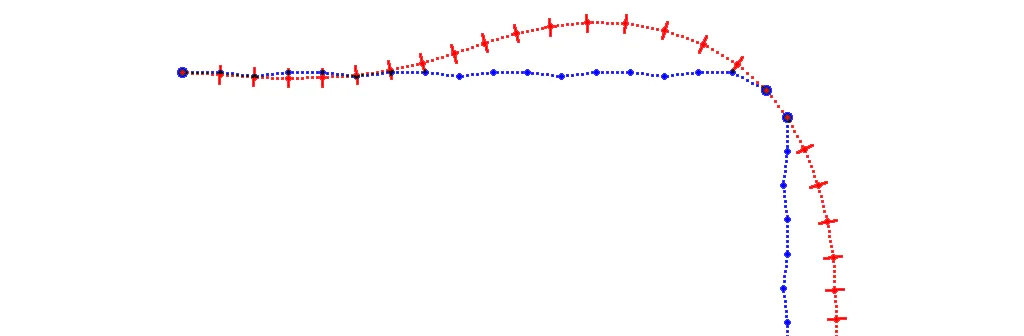
(1-a · b)^ 2来衡量的(其中a和b是指向下一个航路点的单位向量),并且曲率总和(乘以某个常数)被添加到成本函数中。航路点沿着路径的当前方向移动,注意这会随着优化的进行而不断变化。 - NikoNyrh