我正在尝试从两张图像中找到相机外参。我已经有了来自CameraCalibration的内参,场景具有已知的尺寸(使用3DSMAX创建)。
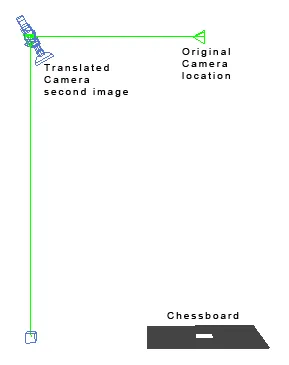
棋盘大小为1000*1000,每个方格大小为125*125。相机位于(0,0,3000),直视位于原点中心的棋盘。在第二张图像中,相机沿Y轴旋转30度并向左平移(-1500, 0, -402),以再次对准棋盘中心:
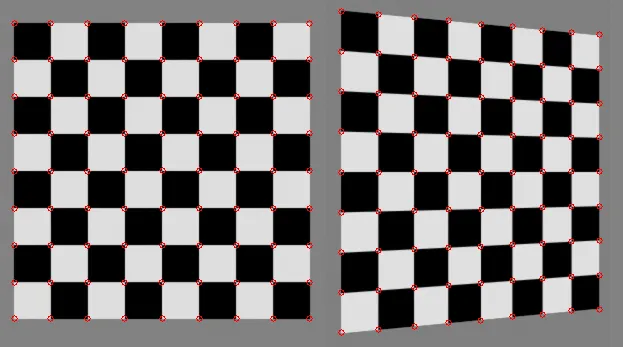
GoodFeaturesToTrack正确识别出81个角点:
我创建了棋盘角点的三维点,使用cvFindExtrinsicCameraParams2计算内参和使用cvRodrigues2获取旋转矩阵。以下是代码:
Imports Emgu.CV
Imports Emgu.CV.Structure
Imports Emgu.CV.CvInvoke
Imports Emgu.CV.CvEnum
Imports Emgu.CV.UI
Imports System.Drawing
Imports System.IO
Imports System.Diagnostics
Imports System.Math
Module main_
Sub Main()
Const MAXFEATURES As Integer = 100
Dim featuresA(0)() As PointF
Dim featuresB(0)() As PointF
Dim features As Integer = 0
Dim imgA As Emgu.CV.Image(Of Emgu.CV.Structure.Bgr, Byte)
Dim imgB As Emgu.CV.Image(Of Emgu.CV.Structure.Bgr, Byte)
Dim grayA As Emgu.CV.Image(Of Emgu.CV.Structure.Gray, Byte)
Dim grayB As Emgu.CV.Image(Of Emgu.CV.Structure.Gray, Byte)
Dim pyrBufferA As Emgu.CV.Image(Of Emgu.CV.Structure.Gray, Byte)
Dim pyrBufferB As Emgu.CV.Image(Of Emgu.CV.Structure.Gray, Byte)
Dim pointsA As Matrix(Of Single)
Dim pointsB As Matrix(Of Single)
Dim flags As Emgu.CV.CvEnum.LKFLOW_TYPE = Emgu.CV.CvEnum.LKFLOW_TYPE.DEFAULT
Dim imagesize As Size
Dim termcrit As New Emgu.CV.Structure.MCvTermCriteria(20, 0.03D)
Dim status As Byte() = Nothing
Dim errors As Single() = Nothing
Dim red As Bgr = New Bgr(Color.Red)
' Load chessboards
imgA = New Image(Of [Structure].Bgr, Byte)("chessboard centre.jpg")
imgB = New Image(Of [Structure].Bgr, Byte)("chessboard left.jpg")
grayA = imgA.Convert(Of Gray, Byte)()
grayB = imgB.Convert(Of Gray, Byte)()
' setup for feature detection
imagesize = cvGetSize(grayA)
pyrBufferA = New Emgu.CV.Image(Of Emgu.CV.Structure.Gray, Byte)(imagesize.Width + 8, imagesize.Height / 3)
pyrBufferB = New Emgu.CV.Image(Of Emgu.CV.Structure.Gray, Byte)(imagesize.Width + 8, imagesize.Height / 3)
features = MAXFEATURES
' Find features
featuresA = grayA.GoodFeaturesToTrack(features, 0.01, 25, 3)
grayA.FindCornerSubPix(featuresA, New System.Drawing.Size(10, 10), New System.Drawing.Size(-1, -1), termcrit)
features = featuresA(0).Length
' Compute optical flow. Not necessary here but good to remember
Emgu.CV.OpticalFlow.PyrLK(grayA, grayB, pyrBufferA, pyrBufferB, featuresA(0), New Size(25, 25), 3, termcrit, flags, featuresB(0), status, errors)
Debug.Assert(featuresA(0).GetUpperBound(0) = featuresB(0).GetUpperBound(0))
' Copy features to an easier-to-use matrix and get min/max to create 3d points
Dim minx As Double = Double.MaxValue
Dim miny As Double = Double.MaxValue
Dim maxx As Double = Double.MinValue
Dim maxy As Double = Double.MinValue
pointsA = New Matrix(Of Single)(features, 2)
pointsB = New Matrix(Of Single)(features, 2)
For i As Integer = 0 To features - 1
pointsA(i, 0) = featuresA(0)(i).X
pointsA(i, 1) = featuresA(0)(i).Y
pointsB(i, 0) = featuresB(0)(i).X
pointsB(i, 1) = featuresB(0)(i).Y
If pointsA(i, 0) < minx Then
minx = pointsA(i, 0)
End If
If pointsA(i, 1) < miny Then
miny = pointsA(i, 1)
End If
If pointsA(i, 0) > maxx Then
maxx = pointsA(i, 0)
End If
If pointsA(i, 1) > maxy Then
maxy = pointsA(i, 1)
End If
Next
' Create 3D object points that correspond to chessboard corners
' (The chessboard is 1000*1000, squares are 125*125)
Dim corners As Integer = Sqrt(features)
Dim obj As New Matrix(Of Double)(features, 3)
Dim squaresize2dx As Double = (maxx - minx) / 8 ' pixel width of a chessboard square
Dim squaresize2dy As Double = (maxy - miny) / 8 ' pixel height of a chessboard square
For i As Integer = 0 To features - 1
obj(i, 0) = Math.Round((pointsA(i, 0) - minx) / squaresize2dx) * 125 ' X=0, 125, 250, 375 ... 1000
obj(i, 1) = Math.Round((pointsA(i, 1) - miny) / squaresize2dy) * 125 ' idem in Y
obj(i, 2) = 0
' Debug.WriteLine(pointsA(i, 0) & " " & pointsA(i, 1) & " " & obj(i, 0) & " " & obj(i, 1) & " " & obj(i, 2)) ' Just to verify
Next
' These were calculated with CalibrateCamera using the same images
Dim intrinsics As New Matrix(Of Double)({{889.1647, 0.0, 318.3721},
{0.0, 888.5134, 238.4254},
{0.0, 0.0, 1.0}})
' Find extrinsics
Dim distortion As New Matrix(Of Double)({-0.036302, 2.008797, -29.674306, -29.674306})
Dim translation As New Matrix(Of Double)(3, 1)
Dim rotation As New Matrix(Of Double)(3, 1)
cvFindExtrinsicCameraParams2(obj, pointsA, intrinsics, distortion, rotation, translation, False)
' Convert rotation vector to rotation matrix
Dim rotmat As New Matrix(Of Double)(3, 3)
Dim jacobian As New Matrix(Of Double)(9, 3)
cvRodrigues2(rotation, rotmat, jacobian)
' From http://en.wikipedia.org/wiki/Rotation_representation paragraph "Conversion formulae between representations"
Dim yr As Double = Asin(-rotmat(2, 0))
Dim xr As Double = Asin(rotmat(2, 1) / Cos(yr))
Dim zr As Double = Asin(rotmat(1, 0) / Cos(yr))
End Sub
End Module
结果似乎不正确,我期望的是翻译/旋转,但我得到了这个:
translation
208.394425348956
-169.447506344527
-654.273807995629
rotation
-0.0224937226554797
-2.13660350939653
-1.10542281290682
rotmat
-0.741100224945266 0.322885083546921 -0.588655824237707
-0.293966101915684 0.632206237134128 0.716867633983572
0.603617749499279 0.704315622822328 -0.373610915174894
xr=1.08307908108382 yr=-0.648031006135158 zr=-0.377625254910525
xr=62.0558602250101° yr=-37.1294416451609° zr=-21.636333343925°
有人知道我做错了什么吗?谢谢!