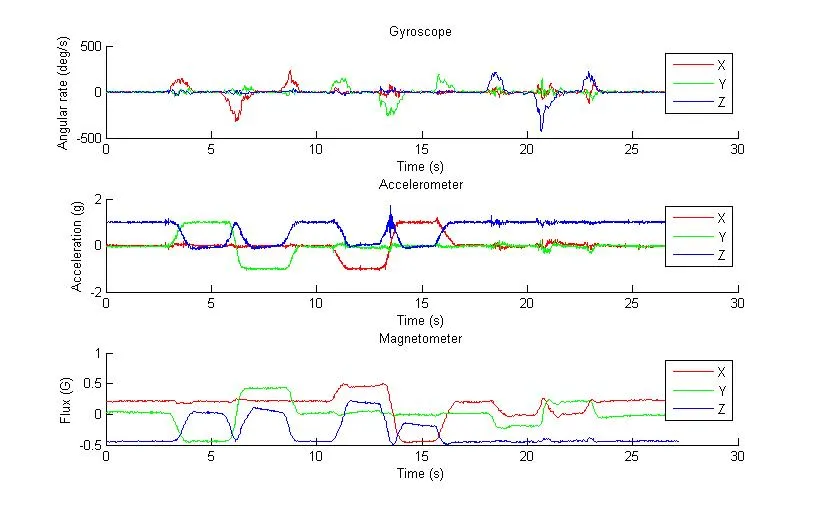
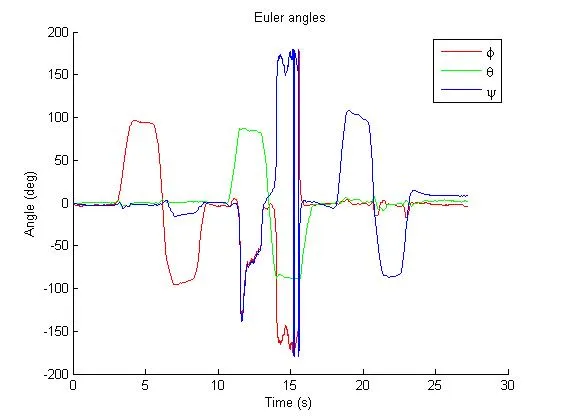
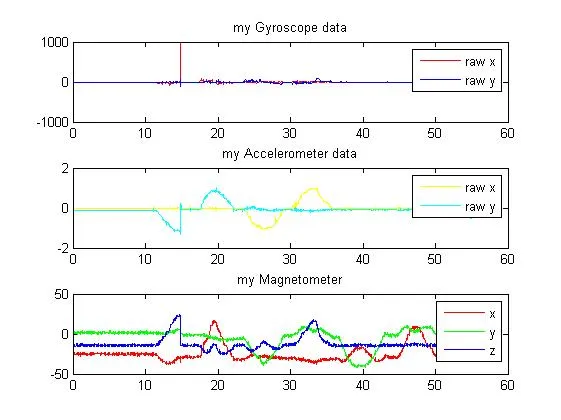
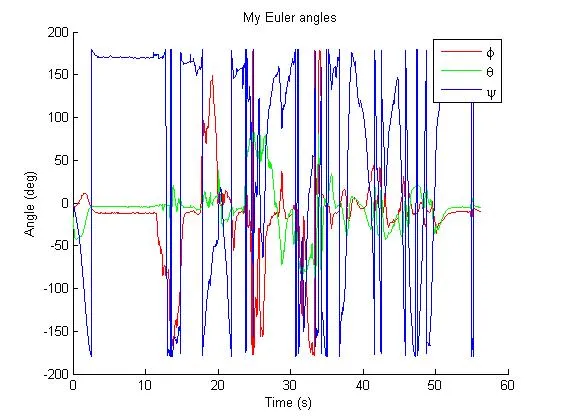
我正在尝试使用Sebastian Madgwick的IMU 算法从我的MPU-9150传感器中获取横滚、俯仰和偏航角。我下载的文件夹带有一些示例数据,我只是用自己的数据替换了这些数据,并确保单位/约定等保持不变。问题是,使用我的数据算法输出的角度没有多大意义,而且非常嘈杂,特别是偏航角。横滚和俯仰似乎是合理的,但我可以通过加速度计/陀螺仪数据获得更好的结果。我附上了他的示例数据(可行的),我的数据和我的输出的绘图。
在我尝试使用这些算法之前,是否需要对我的数据进行额外的过滤?到目前为止,我只是使用中值滤波进行尝试,但似乎没有什么区别。
谢谢