问题
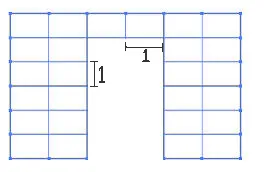
我有一组均匀分布的顶点(一个 网格)。当垂直或水平移动时,相邻顶点之间的距离为1(普通网格单位)。基本上是一个普通的网格:
以下是我代码中的约束条件:
- 访问每个顶点
- 只能垂直或水平移动(不是对角线)
我只需要添加一个约束条件。我需要最小化转弯次数。也就是说,最小化 “推销员” 需要改变方向的次数 (如下面的例子所示)。如何实现这个目标呢?
例子
在这两张图像中,虽然所有的顶点都被访问了,但到达那里所需的转弯次数是不同的。我想要尽量减少这些转弯次数。
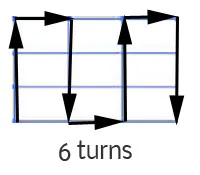
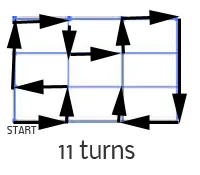
如何实现这个目标呢?
我的代码
为了简化,以下是我的代码(只有一个4x4的网格)。
#include <boost/config.hpp>
#include <iostream>
#include <fstream>
#include <boost/graph/graph_traits.hpp>
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/dijkstra_shortest_paths.hpp>
using namespace boost;
int main(int, char *[])
{
typedef adjacency_list < listS, vecS, directedS, no_property, property < edge_weight_t, int > > graph_t;
typedef graph_traits < graph_t >::vertex_descriptor vertex_descriptor;
typedef graph_traits < graph_t >::edge_descriptor edge_descriptor;
typedef std::pair<int, int> Edge;
// This just creates a 4x4 vertex grid like in the examples above
const int num_nodes = 16;
enum nodes { A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P };
char name[] = "ABCDEFGHIJKLMNOP";
Edge edge_array[] =
{
Edge(A, B), Edge(B, C), Edge(C, D),
Edge(A, E), Edge(B, F), Edge(C, G), Edge(D, H),
Edge(E, F), Edge(F, G), Edge(G, H),
Edge(E, I), Edge(F, J), Edge(G, K), Edge(K, L),
Edge(I, J), Edge(J, K), Edge(K, L),
Edge(I, M), Edge(J, N), Edge(K, O), Edge(L, P),
Edge(M, N), Edge(N, O), Edge(O, P),
};
int weights[num_nodes];
std::fill_n(weights, num_nodes, 1); // set all edge weights to 1
int num_arcs = sizeof(edge_array) / sizeof(Edge);
graph_t g(edge_array, edge_array + num_arcs, weights, num_nodes);
property_map<graph_t, edge_weight_t>::type weightmap = get(edge_weight, g);
std::vector<vertex_descriptor> p(num_vertices(g));
std::vector<int> d(num_vertices(g));
vertex_descriptor s = vertex(A, g);
dijkstra_shortest_paths(g, s, predecessor_map(&p[0]).distance_map(&d[0]));
return EXIT_SUCCESS;
}