我已经编写了一些使用OpenCV库的代码,用于检测草地上涂白色的线条。我需要有人对我使用的方法提供意见(因为我确信肯定有比我的更好的方法)。此外,我得到的结果不如预期,因为图像中的轻微变化需要调整参数(而且我需要操作固定的参数)。
到目前为止,我的方法是:
附带一张样本图片: 我得到的结果:
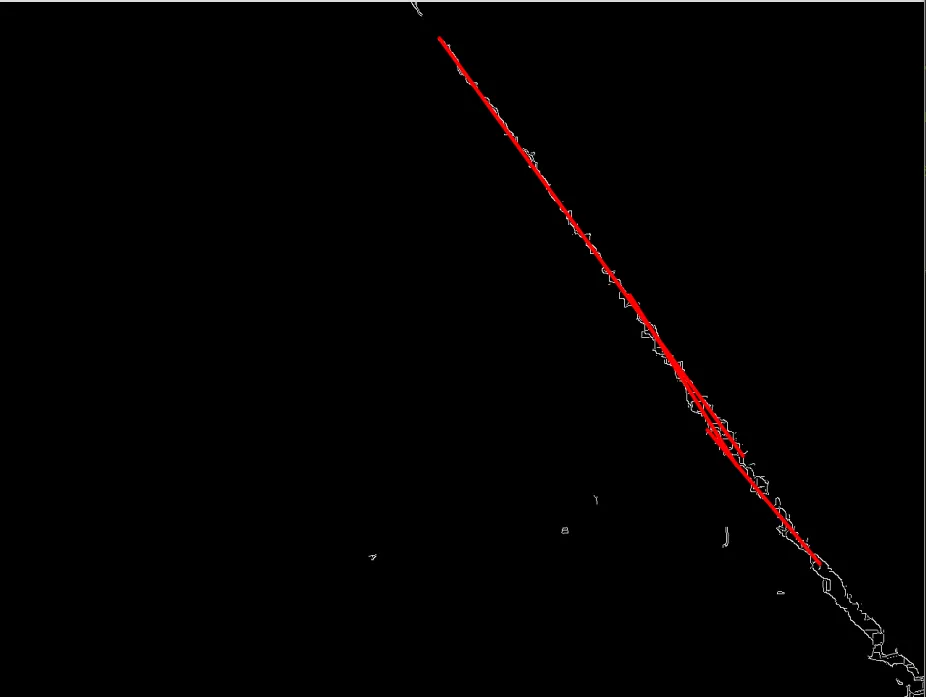
带有canny
我得到的结果:
带有canny
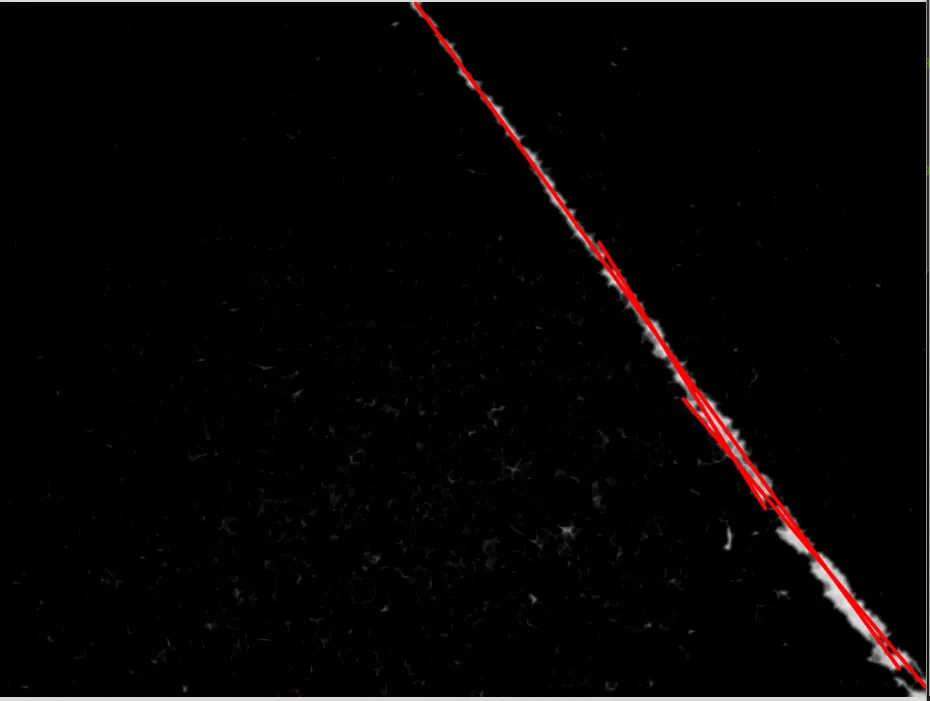
 没有canny(稍微调整了参数)
没有canny(稍微调整了参数)
 任何帮助或指导都将不胜感激!我只是不知道该怎么做才能改进它!
任何帮助或指导都将不胜感激!我只是不知道该怎么做才能改进它!
更新: 使用所选答案的快速骨架实现(大量模糊)之后,我得到了这个结果: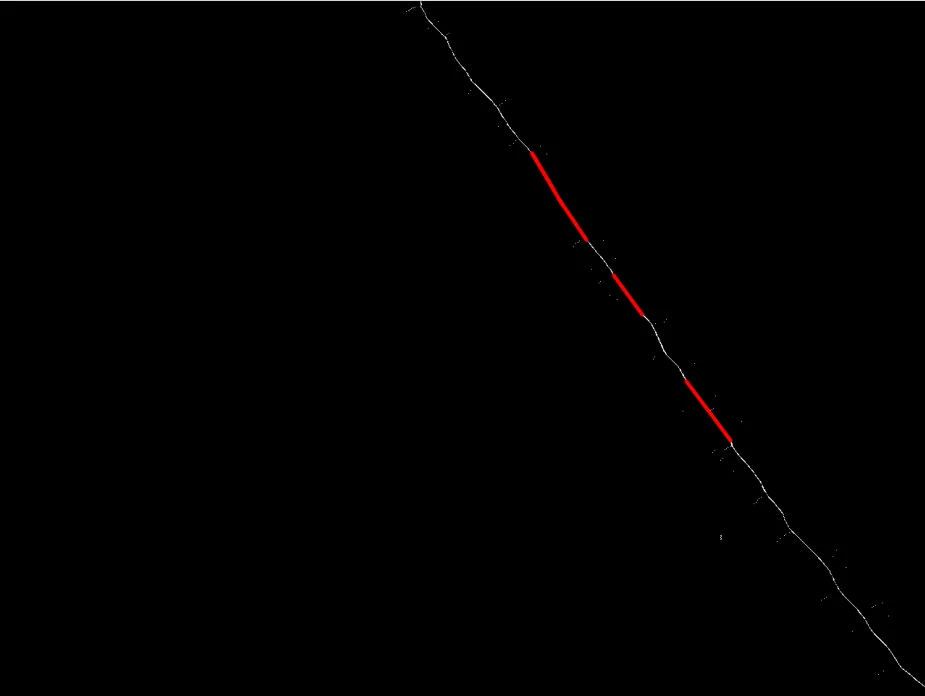
到目前为止,我的方法是:
- 从网络摄像头获取图像(显然转换为灰度)
- 将其通过阈值过滤器运行(使用THRESH_TO_ZERO模式,在这种模式下,它会将低于阈值的任何像素值都归零)。
- 模糊图像
- 运行它通过腐蚀过滤器
- 运行它通过Canny边缘检测器
- 最后,使用Probabilistic Hough Transform HoughLinesP找到这个处理过的图像并找到线条。
附带一张样本图片:
我得到的结果:
带有canny
没有canny(稍微调整了参数)
任何帮助或指导都将不胜感激!我只是不知道该怎么做才能改进它!更新: 使用所选答案的快速骨架实现(大量模糊)之后,我得到了这个结果: