我正在开发一个控制M95128-W EEPROM的库,用于STM32设备。我已经实现了库中的数据写入和读取,但是每个页面的第一个字节不符合预期,似乎固定为
例如,我从地址
模式继续。我也尝试从地址0x00只写入8个字节,但问题仍然存在,所以我认为我们可以排除翻转的可能性。
我已经尝试删除debug printConsole,但没有效果。
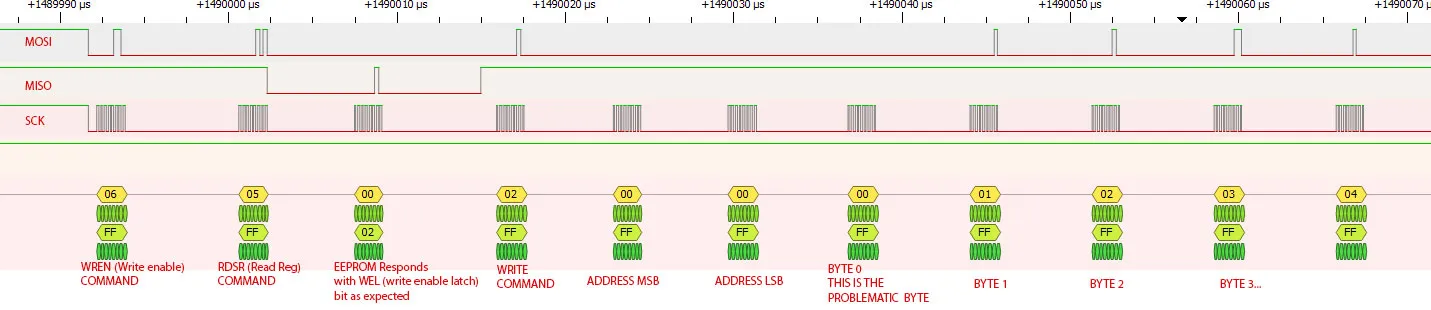
这是写命令的SPI逻辑跟踪:
0x04。例如,我从地址
0x00开始写入128个字节,值为0x80,但在读取时得到的结果为:byte[0] = 0x04;
byte[1] = 0x80;
byte[2] = 0x80;
byte[3] = 0x80;
.......
byte[64] = 0x04;
byte[65] = 0x80;
byte[66] = 0x80;
byte[67] = 0x80;
我已经使用逻辑分析仪调试了SPI,并确认了正确的字节被发送。在读取命令时,使用逻辑分析仪时,来自EEPROM的神秘0x04被传输。
以下是我的代码:
void FLA::write(const void* data, unsigned int dataLength, uint16_t address)
{
int pagePos = 0;
int pageCount = (dataLength + 64 - 1) / 64;
int bytePos = 0;
int startAddress = address;
while (pagePos < pageCount)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2, GPIO_PIN_SET); // WP High
chipSelect();
_spi->transfer(INSTRUCTION_WREN);
chipUnselect();
uint8_t status = readRegister(INSTRUCTION_RDSR);
chipSelect();
_spi->transfer(INSTRUCTION_WRITE);
uint8_t xlow = address & 0xff;
uint8_t xhigh = (address >> 8);
_spi->transfer(xhigh); // part 1 address MSB
_spi->transfer(xlow); // part 2 address LSB
for (unsigned int i = 0; i < 64 && bytePos < dataLength; i++ )
{
uint8_t byte = ((uint8_t*)data)[bytePos];
_spi->transfer(byte);
printConsole("Wrote byte to ");
printConsoleInt(startAddress + bytePos);
printConsole("with value ");
printConsoleInt(byte);
printConsole("\n");
bytePos ++;
}
_spi->transfer(INSTRUCTION_WRDI);
chipUnselect();
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2, GPIO_PIN_RESET); //WP LOW
bool writeComplete = false;
while (writeComplete == false)
{
uint8_t status = readRegister(INSTRUCTION_RDSR);
if(status&1<<0)
{
printConsole("Waiting for write to complete....\n");
}
else
{
writeComplete = true;
printConsole("Write complete to page ");
printConsoleInt(pagePos);
printConsole("@ address ");
printConsoleInt(bytePos);
printConsole("\n");
}
}
pagePos++;
address = address + 64;
}
printConsole("Finished writing all pages total bytes ");
printConsoleInt(bytePos);
printConsole("\n");
}
void FLA::read(char* returndata, unsigned int dataLength, uint16_t address)
{
chipSelect();
_spi->transfer(INSTRUCTION_READ);
uint8_t xlow = address & 0xff;
uint8_t xhigh = (address >> 8);
_spi->transfer(xhigh); // part 1 address
_spi->transfer(xlow); // part 2 address
for (unsigned int i = 0; i < dataLength; i++)
returndata[i] = _spi->transfer(0x00);
chipUnselect();
}
希望得到任何建议或帮助。
更新:
我尝试编写连续的 255 字节递增数据来检查循环。结果如下:
byte[0] = 4; // Incorrect Mystery Byte
byte[1] = 1;
byte[2] = 2;
byte[3] = 3;
.......
byte[63] = 63;
byte[64] = 4; // Incorrect Mystery Byte
byte[65] = 65;
byte[66] = 66;
.......
byte[127] = 127;
byte[128] = 4; // Incorrect Mystery Byte
byte[129} = 129;
模式继续。我也尝试从地址0x00只写入8个字节,但问题仍然存在,所以我认为我们可以排除翻转的可能性。
我已经尝试删除debug printConsole,但没有效果。
这是写命令的SPI逻辑跟踪:
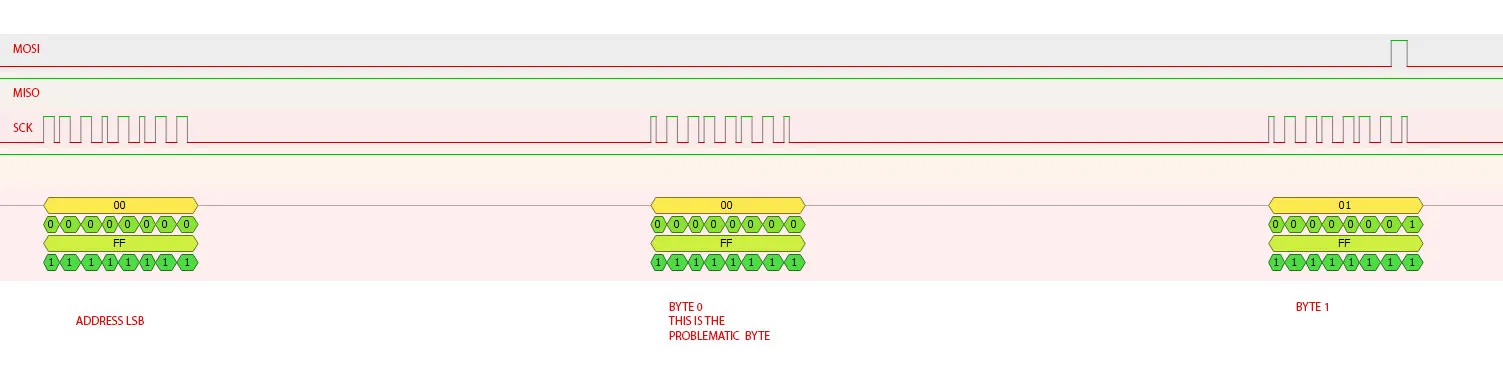
以下是第一个字节的近距离照片,它无法正常工作:
代码可以在gitlab上查看,链接如下: https://gitlab.com/DanielBeyzade/stm32f107vc-home-control-master/blob/master/Src/flash.cpp
SPI的初始化代码可以在MX_SPI_Init()中看到。
https://gitlab.com/DanielBeyzade/stm32f107vc-home-control-master/blob/master/Src/main.cpp
我在SPI总线上有另一个设备(RFM69HW RF模块),它按预期发送和接收数据。
FLA::read? - a3f