当我开始使用CGAL时,我几乎立即遇到了这个问题。仔细阅读
多边形网格文档后,我找到了解决方案。基本上,通过修改版的
Corefinement,您可以平滑地将两个不同的几何体网格拼合在一起,无论它们的多边形数量或形状如何(但是,多边形之间的差异越大,就越不有效)。
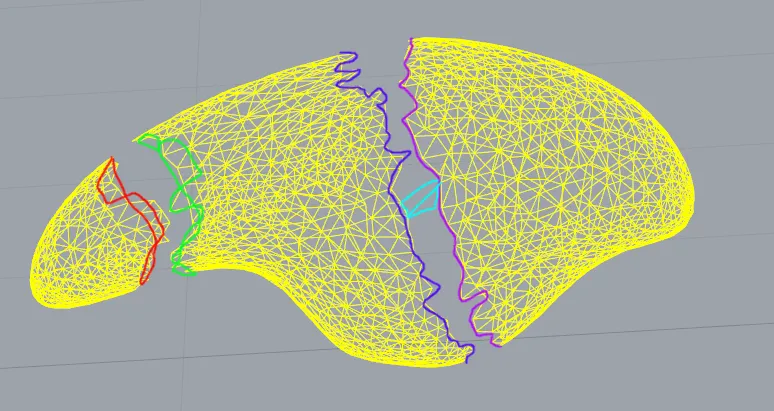
您需要做的第一件事是确保几何体不自相交。其次,确保
CGAL :: Polygon_mesh_processing :: clip()在这两个几何体上处于活动状态(我建议使用
close_volumes = false)。然后,计算这两个新网格的并集:
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/Polygon_mesh_processing/corefinement.h>
#include <fstream>
typedef CGAL::Exact_predicates_inexact_constructions_kernel K;
typedef CGAL::Surface_mesh<K::Point_3> Mesh;
namespace PMP = CGAL::Polygon_mesh_processing;
int main(int argc, char* argv[])
{
const char* filename1 = (argc > 1) ? argv[1] : "data/blobby.off";
const char* filename2 = (argc > 2) ? argv[2] : "data/eight.off";
std::ifstream input(filename1);
Mesh mesh1, mesh2;
if (!input || !(input >> mesh1))
{
std::cerr << "First mesh is not a valid off file." << std::endl;
return 1;
}
input.close();
input.open(filename2);
if (!input || !(input >> mesh2))
{
std::cerr << "Second mesh is not a valid off file." << std::endl;
return 1;
}
Mesh out;
bool valid_union = PMP::corefine_and_compute_union(mesh1,mesh2, out);
if (valid_union)
{
std::cout << "Union was successfully computed\n";
std::ofstream output("union.off");
output << out;
return 0;
}
std::cout << "Union could not be computed\n";
return 1;
}
与使用来自具有精确构造的内核的点的网格不同,精确点是网格顶点的属性,我们可以在稍后的操作中重用。通过这个属性,我们可以操作具有浮点坐标的点的网格,但又能从精确构造提供的鲁棒性中受益。
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Exact_predicates_exact_constructions_kernel.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/Polygon_mesh_processing/corefinement.h>
#include <fstream>
typedef CGAL::Exact_predicates_inexact_constructions_kernel K;
typedef CGAL::Exact_predicates_exact_constructions_kernel EK;
typedef CGAL::Surface_mesh<K::Point_3> Mesh;
typedef boost::graph_traits<Mesh>::vertex_descriptor vertex_descriptor;
typedef Mesh::Property_map<vertex_descriptor,EK::Point_3> Exact_point_map;
typedef Mesh::Property_map<vertex_descriptor,bool> Exact_point_computed;
namespace PMP = CGAL::Polygon_mesh_processing;
namespace params = PMP::parameters;
struct Coref_point_map
{
typedef boost::property_traits<Exact_point_map>::value_type value_type;
typedef boost::property_traits<Exact_point_map>::reference reference;
typedef boost::property_traits<Exact_point_map>::category category;
typedef boost::property_traits<Exact_point_map>::key_type key_type;
Exact_point_computed* exact_point_computed_ptr;
Exact_point_map* exact_point_ptr;
Mesh* mesh_ptr;
Exact_point_computed& exact_point_computed() const
{
CGAL_assertion(exact_point_computed_ptr!=NULL);
return *exact_point_computed_ptr;
}
Exact_point_map& exact_point() const
{
CGAL_assertion(exact_point_ptr!=NULL);
return *exact_point_ptr;
}
Mesh& mesh() const
{
CGAL_assertion(mesh_ptr!=NULL);
return *mesh_ptr;
}
CGAL::Cartesian_converter<K, EK> to_exact;
CGAL::Cartesian_converter<EK, K> to_input;
Coref_point_map()
: exact_point_computed_ptr(NULL)
, exact_point_ptr(NULL)
, mesh_ptr(NULL)
{}
Coref_point_map(Exact_point_map& ep,
Exact_point_computed& epc,
Mesh& m)
: exact_point_computed_ptr(&epc)
, exact_point_ptr(&ep)
, mesh_ptr(&m)
{}
friend
reference get(const Coref_point_map& map, key_type k)
{
if (!map.exact_point_computed()[k]){
map.exact_point()[k]=map.to_exact(map.mesh().point(k));
map.exact_point_computed()[k]=true;
}
return map.exact_point()[k];
}
friend
void put(const Coref_point_map& map, key_type k, const EK::Point_3& p)
{
map.exact_point_computed()[k]=true;
map.exact_point()[k]=p;
map.mesh().point(k)=map.to_input(p);
}
};
int main(int argc, char* argv[])
{
const char* filename1 = (argc > 1) ? argv[1] : "data/blobby.off";
const char* filename2 = (argc > 2) ? argv[2] : "data/eight.off";
std::ifstream input(filename1);
Mesh mesh1, mesh2;
if (!input || !(input >> mesh1))
{
std::cerr << "First mesh is not a valid off file." << std::endl;
return 1;
}
input.close();
input.open(filename2);
if (!input || !(input >> mesh2))
{
std::cerr << "Second mesh is not a valid off file." << std::endl;
return 1;
}
Exact_point_map mesh1_exact_points =
mesh1.add_property_map<vertex_descriptor,EK::Point_3>("e:exact_point").first;
Exact_point_computed mesh1_exact_points_computed =
mesh1.add_property_map<vertex_descriptor,bool>("e:exact_points_computed").first;
Exact_point_map mesh2_exact_points =
mesh2.add_property_map<vertex_descriptor,EK::Point_3>("e:exact_point").first;
Exact_point_computed mesh2_exact_points_computed =
mesh2.add_property_map<vertex_descriptor,bool>("e:exact_points_computed").first;
Coref_point_map mesh1_pm(mesh1_exact_points, mesh1_exact_points_computed, mesh1);
Coref_point_map mesh2_pm(mesh2_exact_points, mesh2_exact_points_computed, mesh2);
if ( PMP::corefine_and_compute_intersection(mesh1,
mesh2,
mesh1,
params::vertex_point_map(mesh1_pm),
params::vertex_point_map(mesh2_pm),
params::vertex_point_map(mesh1_pm) ) )
{
if ( PMP::corefine_and_compute_union(mesh1,
mesh2,
mesh2,
params::vertex_point_map(mesh1_pm),
params::vertex_point_map(mesh2_pm),
params::vertex_point_map(mesh2_pm) ) )
{
std::cout << "Intersection and union were successfully computed\n";
std::ofstream output("inter_union.off");
output << mesh2;
return 0;
}
std::cout << "Union could not be computed\n";
return 1;
}
std::cout << "Intersection could not be computed\n";
return 1;
}
corefine_and_compute_union和corefine_and_compute_intersection。文档中也没有给出清晰的解释。您能否稍微解释一下? - Nielscorefine_and_compute_union计算网格中重叠的部分,并需要将其移除并替换为多边形填充。corefine_and_compute_intersection与前者类似,但使用现有网格来填充切口,而不是生成平滑的网格填充。第一个函数通常需要精确的输入才能工作,但第二个函数允许将其作为参数传递。 - Vendetta