动态占位符
TensorFlow允许在占位符中有多个动态(即None)维度。引擎在构建图时无法确保正确性,因此客户端负责提供正确的输入,但它提供了很大的灵活性。
所以我从...
x = tf.placeholder(tf.float32, shape=[None, N*M*P])
y_ = tf.placeholder(tf.float32, shape=[None, N*M*P, 3])
...
x_image = tf.reshape(x, [-1, N, M, P, 1])
到...
x_image = tf.placeholder(tf.float32, shape=[None, None, None, None, 1])
label = tf.placeholder(tf.float32, shape=[None, None, 3])
既然您打算将输入重塑为5D,为什么不从一开始就在x_image中使用5D呢?此时,label的第二维是任意的,但我们向tensorflow承诺它将与x_image匹配。
转置卷积中的动态形状
接下来,tf.nn.conv3d_transpose的好处在于其输出形状可以是动态的。因此,可以改为:
DeConnv1 = tf.nn.conv3d_transpose(layer1, w, output_shape=[1,32,32,7,1], ...)
...你可以这样做:
DeConnv1 = tf.nn.conv3d_transpose(layer1, w, output_shape=tf.shape(x_image), ...)
这样,转置卷积可以应用于
任何图像,并且结果将采用在运行时实际传递的
x_image的形状。
请注意,
x_image的静态形状为
(?, ?, ?, ?, 1)。
全卷积网络
整个网络都是卷积的,包括最后的密集层。密集层必须静态地定义其维度,这迫使整个神经网络固定输入图像的尺寸。
幸运的是,Springenberg等人在
"Striving for Simplicity: The All Convolutional Net"论文中描述了一种用CONV层替换FC层的方法。我将使用具有3个
1x1x1过滤器的卷积(也请参见
this question)。
final_conv = conv3d_s1(final, weight_variable([1, 1, 1, 1, 3]))
y = tf.reshape(final_conv, [-1, 3])
如果我们确保
final与
DeConnv1(和其他)具有相同的维度,它将使
y的形状正确:
[-1,N * M * P,3]。
将所有内容组合在一起
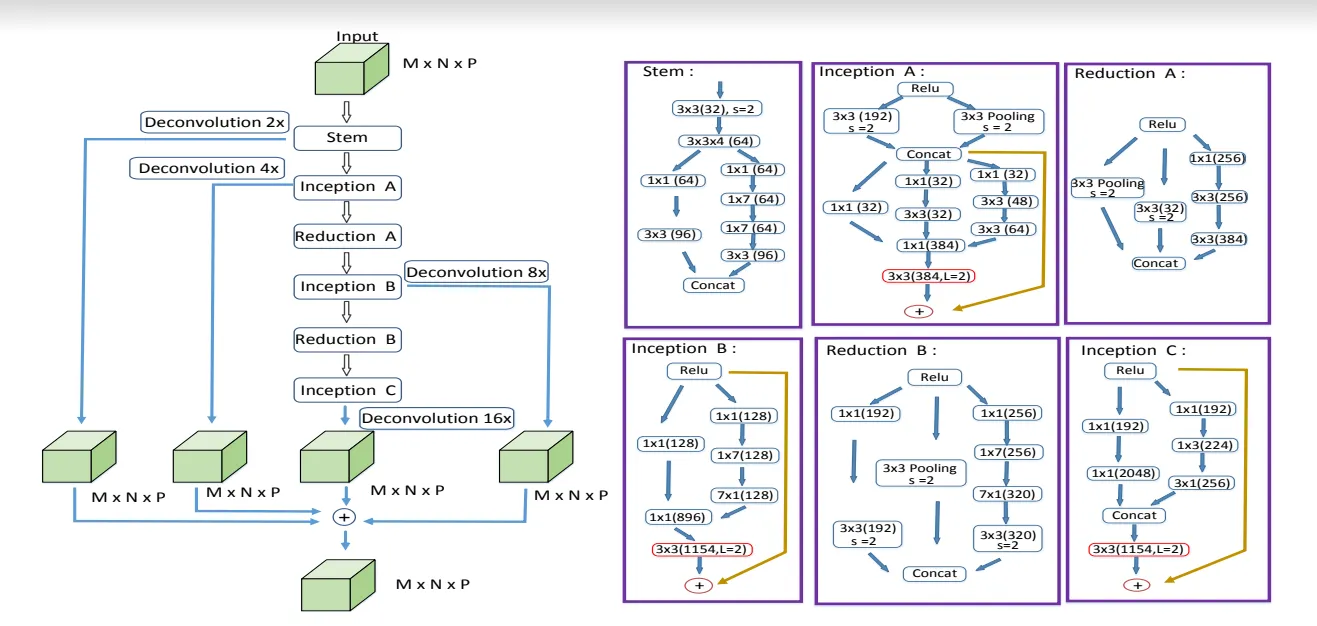
您的网络非常大,但所有反卷积基本上都遵循相同的模式,因此我已经简化了我的概念验证代码,只使用一个反卷积。目标只是展示能够处理任意大小图像的网络类型。最后一点:图像尺寸可以在批次之间变化,但在一个批次内必须相同。
完整代码:
sess = tf.InteractiveSession()
def conv3d_dilation(tempX, tempFilter):
return tf.layers.conv3d(tempX, filters=tempFilter, kernel_size=[3, 3, 1], strides=1, padding='SAME', dilation_rate=2)
def conv3d(tempX, tempW):
return tf.nn.conv3d(tempX, tempW, strides=[1, 2, 2, 2, 1], padding='SAME')
def conv3d_s1(tempX, tempW):
return tf.nn.conv3d(tempX, tempW, strides=[1, 1, 1, 1, 1], padding='SAME')
def weight_variable(shape):
initial = tf.truncated_normal(shape, stddev=0.1)
return tf.Variable(initial)
def bias_variable(shape):
initial = tf.constant(0.1, shape=shape)
return tf.Variable(initial)
def max_pool_3x3(x):
return tf.nn.max_pool3d(x, ksize=[1, 3, 3, 3, 1], strides=[1, 2, 2, 2, 1], padding='SAME')
x_image = tf.placeholder(tf.float32, shape=[None, None, None, None, 1])
label = tf.placeholder(tf.float32, shape=[None, None, 3])
W_conv1 = weight_variable([3, 3, 1, 1, 32])
h_conv1 = conv3d(x_image, W_conv1)
W_conv2 = weight_variable([3, 3, 4, 32, 64])
h_conv2 = conv3d_s1(h_conv1, W_conv2)
W_conv3_A = weight_variable([1, 1, 1, 64, 64])
h_conv3_A = conv3d_s1(h_conv2, W_conv3_A)
W_conv3_B = weight_variable([1, 1, 1, 64, 64])
h_conv3_B = conv3d_s1(h_conv2, W_conv3_B)
W_conv4_A = weight_variable([3, 3, 1, 64, 96])
h_conv4_A = conv3d_s1(h_conv3_A, W_conv4_A)
W_conv4_B = weight_variable([1, 7, 1, 64, 64])
h_conv4_B = conv3d_s1(h_conv3_B, W_conv4_B)
W_conv5_B = weight_variable([1, 7, 1, 64, 64])
h_conv5_B = conv3d_s1(h_conv4_B, W_conv5_B)
W_conv6_B = weight_variable([3, 3, 1, 64, 96])
h_conv6_B = conv3d_s1(h_conv5_B, W_conv6_B)
layer1 = tf.concat([h_conv4_A, h_conv6_B], 4)
w = tf.Variable(tf.constant(1., shape=[2, 2, 4, 1, 192]))
DeConnv1 = tf.nn.conv3d_transpose(layer1, filter=w, output_shape=tf.shape(x_image), strides=[1, 2, 2, 2, 1], padding='SAME')
final = DeConnv1
final_conv = conv3d_s1(final, weight_variable([1, 1, 1, 1, 3]))
y = tf.reshape(final_conv, [-1, 3])
cross_entropy = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(labels=label, logits=y))
print('x_image:', x_image)
print('DeConnv1:', DeConnv1)
print('final_conv:', final_conv)
def try_image(N, M, P, B=1):
batch_x = np.random.normal(size=[B, N, M, P, 1])
batch_y = np.ones([B, N * M * P, 3]) / 3.0
deconv_val, final_conv_val, loss = sess.run([DeConnv1, final_conv, cross_entropy],
feed_dict={x_image: batch_x, label: batch_y})
print(deconv_val.shape)
print(final_conv.shape)
print(loss)
print()
tf.global_variables_initializer().run()
try_image(32, 32, 7)
try_image(16, 16, 3)
try_image(16, 16, 3, 2)
try_image对我有效。而且我从未说过它是一个密集层。它是密集层的替代品。 - Maxim