我希望能够根据Tomasi和Kanade [1992]的论文构建一个简单的运动结构程序。文章可以在下面找到:
这种方法看起来优雅简洁,但是我在计算上述参考文献中方程16所概述的度量约束时遇到了困难。
我正在使用R,并已经列出了我的工作如下:
给定一组图像。
下面是提供的w:
我们可以通过奇异值分解将
现在我们可以通过方程(14)来解出
然而,这些结果并不唯一,我们仍需要通过方程(15)来解决R和S。
有人能提供关于如何解决这个问题的建议吗?先感谢您,并让我知道是否需要更清楚地表达我的问题。
我正在使用R,并已经列出了我的工作如下:
给定一组图像。
我希望能够追踪三个橱柜门和一张图片的角落(图像上的黑点)。首先,我们将这些点读入一个矩阵w中。
下面是提供的w:
w.vector=c(0.2076,0.1369,0.1918,0.1862,0.1741,0.1434,0.176,0.1723,0.2047,0.233,0.3593,0.3668,0.3744,0.3593,0.3876,0.3574,0.3639,0.3062,0.3295,0.3267,0.3128,0.2811,0.2979,0.2876,0.2782,0.2876,0.3838,0.3819,0.3819,0.3649,0.3913,0.3555,0.3593,0.2997,0.3202,0.3137,0.31,0.2718,0.2895,0.2867,0.825,0.7703,0.742,0.7251,0.7232,0.7138,0.7345,0.6911,0.1937,0.1248,0.1723,0.1741,0.1657,0.1313,0.162,0.1657,0.8834,0.8118,0.7552,0.727,0.7364,0.7232,0.7288,0.6892,0.4309,0.3798,0.4021,0.3965,0.3844,0.3546,0.3695,0.3583,0.314,0.3065,0.3989,0.3876,0.3857,0.3781,0.3989,0.3593,0.5184,0.4849,0.5147,0.5193,0.5109,0.4812,0.4979,0.4849,0.3536,0.3517,0.4121,0.3951,0.3951,0.3781,0.397,0.348,0.5175,0.484,0.5091,0.5147,0.5128,0.4784,0.4905,0.4821,0.7722,0.7326,0.7326,0.7232,0.7232,0.7119,0.7402,0.7006,0.4281,0.3779,0.3918,0.3863,0.3825,0.3472,0.3611,0.3537,0.8043,0.7628,0.7458,0.7288,0.727,0.7213,0.7364,0.6949,0.5789,0.5491,0.5761,0.5817,0.5733,0.5444,0.5537,0.5379,0.3649,0.3536,0.4177,0.3951,0.3857,0.3819,0.397,0.3461,0.697,0.671,0.6821,0.6821,0.6719,0.6412,0.6468,0.6235,0.3744,0.3649,0.4159,0.3819,0.3781,0.3612,0.3763,0.314,0.7008,0.6691,0.6794,0.6812,0.6747,0.6393,0.6412,0.6235,0.7571,0.7345,0.7439,0.7496,0.7402,0.742,0.7647,0.7213,0.5817,0.5463,0.5696,0.5779,0.5761,0.5398,0.551,0.5398,0.7665,0.7326,0.7439,0.7345,0.7288,0.727,0.7515,0.7062,0.8301,0.818,0.8571,0.8878,0.8766,0.8561,0.858,0.8394,0.4121,0.3876,0.4347,0.397,0.38,0.3631,0.3668,0.2971,0.912,0.8962,0.9185,0.939,0.9259,0.898,0.8887,0.8571,0.3989,0.3781,0.4215,0.3725,0.3612,0.3461,0.3423,0.2782,0.9092,0.8952,0.9176,0.9399,0.925,0.8971,0.8887,0.8571,0.4743,0.4536,0.4894,0.4517,0.446,0.4328,0.4385,0.3706,0.8273,0.8171,0.8571,0.8878,0.8766,0.8543,0.8561,0.8394,0.4743,0.4554,0.4969,0.4668,0.4536,0.4404,0.4536,0.3857)
w=matrix(w.vector,ncol=16,nrow=16,byrow=FALSE)
然后根据公式2创建注册测量矩阵wm,如下所示:

由
wm = w - rowMeans(w)
我们可以通过奇异值分解将
wm分解为一个“2FxP”矩阵o1、一个对角线“PxP”矩阵e和一个“PxP”矩阵o2。svdwm <- svd(wm)
o1 <- svdwm$u
e <- diag(svdwm$d)
o2 <- t(svdwm$v) ## dont forget the transpose!
然而,由于噪声的影响,我们只关注o1的前3列、e的前3个值以及o2的前3行:
o1p <- svdwm$u[,1:3]
ep <- diag(svdwm$d[1:3])
o2p <- t(svdwm$v)[1:3,] ## dont forget the transpose!
现在我们可以通过方程(14)来解出
rhat和shat。

由
rhat <- o1p%*%ep^(1/2)
shat <- ep^(1/2) %*% o2p
然而,这些结果并不唯一,我们仍需要通过方程(15)来解决R和S。

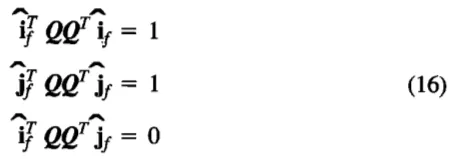
B=Q%*%solve(Q),然后使用Cholesky分解找到Q。方法1似乎是文献中常见的选择,但没有详细说明如何实际解决线性系统。显然,B是一个6个未知数的“3x3”对称矩阵。然而,考虑到度量约束(方程16),我不知道如何在给定3个方程的情况下解决6个未知数。我是否忘记了对称矩阵的某些属性?
方法II涉及使用非线性方法估计Q,这在运动结构文献中不太常用。有人能提供关于如何解决这个问题的建议吗?先感谢您,并让我知道是否需要更清楚地表达我的问题。