我已经校准了我的相机并找到了内在参数(K)。此外,我还计算出了基础矩阵(F)。
现在,E= K_T* F * K。目前为止一切顺利。
现在我们将本质矩阵(E)传递给SVD,使用分解值(U、W、V)来提取旋转和平移:
现在,E= K_T* F * K。目前为止一切顺利。
现在我们将本质矩阵(E)传递给SVD,使用分解值(U、W、V)来提取旋转和平移:
essentialMatrix = K.Transpose().Mul(fund).Mul(K);
CvInvoke.cvSVD(essentialMatrix, wMatrix, uMatrix, vMatrix, Emgu.CV.CvEnum.SVD_TYPE.CV_SVD_DEFAULT);
**问题)目前有两种方法提出了,这让我困惑到底哪一种才能给出正确的答案- 特别是翻译方面:
在第一种方法(链接说明)中,作者建议计算R、T如下所示:
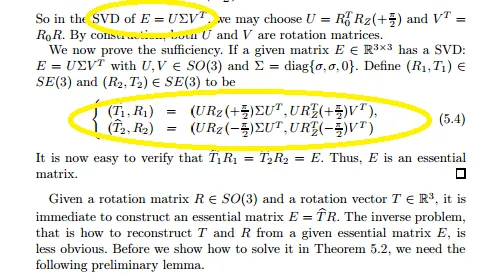
但在第二种方法[http://isit.u-clermont1.fr/~ab/Classes/DIKU-3DCV2/Handouts/Lecture16.pdf]中,作者提供了另一种T的公式,即+U,-U如下所示:
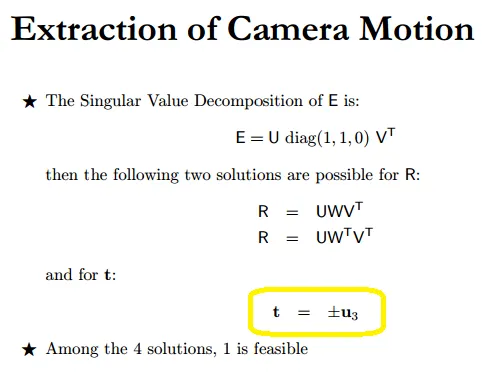
我使用openCv库在C# .Net上实现这个问题。请问哪一个翻译公式是正确的?

{kind=link}