我写了一个小脚本来实现这个功能。欢迎提出建议和修改意见。它的工作原理是检查每个球体表面是否落在所有其他球体的体积之内。
对于球体交集,最好(但速度较慢)在sphere()函数调用中使用更多的面数。这应该会在可视化中给出更密集的结果。对于独立的球体可视化,较小的数字(~50)就足够了。请参阅注释以了解如何可视化每个内容。
close all
clear
clc
figure, hold on
[x,y,z] = sphere(50);
for i = 1 : size(centers,2)
h = surfl(dist(i) * x + centers(1,i), dist(i) * y + centers(2,i), dist(i) * z + centers(3,i));
set(h, 'FaceAlpha', 0.15)
shading interp
end
[x,y,z] = sphere(1000);
xt = zeros([size(x), size(centers,2)]);
yt = zeros([size(y), size(centers,2)]);
zt = zeros([size(z), size(centers,2)]);
xm = zeros([size(x), size(centers,2), size(centers,2)]);
ym = zeros([size(y), size(centers,2), size(centers,2)]);
zm = zeros([size(z), size(centers,2), size(centers,2)]);
for i = 1 : size(centers, 2)
xt(:,:,i) = dist(i) * x + centers(1,i);
yt(:,:,i) = dist(i) * y + centers(2,i);
zt(:,:,i) = dist(i) * z + centers(3,i);
end
for i = 1 : size(centers, 2)
[xm(:,:,:,i), ym(:,:,:,i), zm(:,:,:,i)] = insphere(xt, yt, zt, centers(1,i), centers(2,i), centers(3,i), dist(i)+0.001);
end
xmsum = sum(xm,4);
ymsum = sum(ym,4);
zmsum = sum(zm,4);
xt(xmsum < size(centers,2)) = 0;
yt(ymsum < size(centers,2)) = 0;
zt(zmsum < size(centers,2)) = 0;
for i = 1 : size(centers,2)
xp = xt(:,:,i);
yp = yt(:,:,i);
zp = zt(:,:,i);
zp(~(xp & yp & zp)) = NaN;
surf(xt(:,:,i), yt(:,:,i), zp, 'EdgeColor', 'none');
end
以下是insphere函数的代码:
function [x_new,y_new,z_new] = insphere(x,y,z, x0, y0, z0, r)
x_new = (x - x0).^2 + (y - y0).^2 + (z - z0).^2 <= r^2;
y_new = (x - x0).^2 + (y - y0).^2 + (z - z0).^2 <= r^2;
z_new = (x - x0).^2 + (y - y0).^2 + (z - z0).^2 <= r^2;
end
可视化示例
这些示例中使用的 6 个球体,平均需要 1.934 秒在我的笔记本电脑上运行组合可视化。
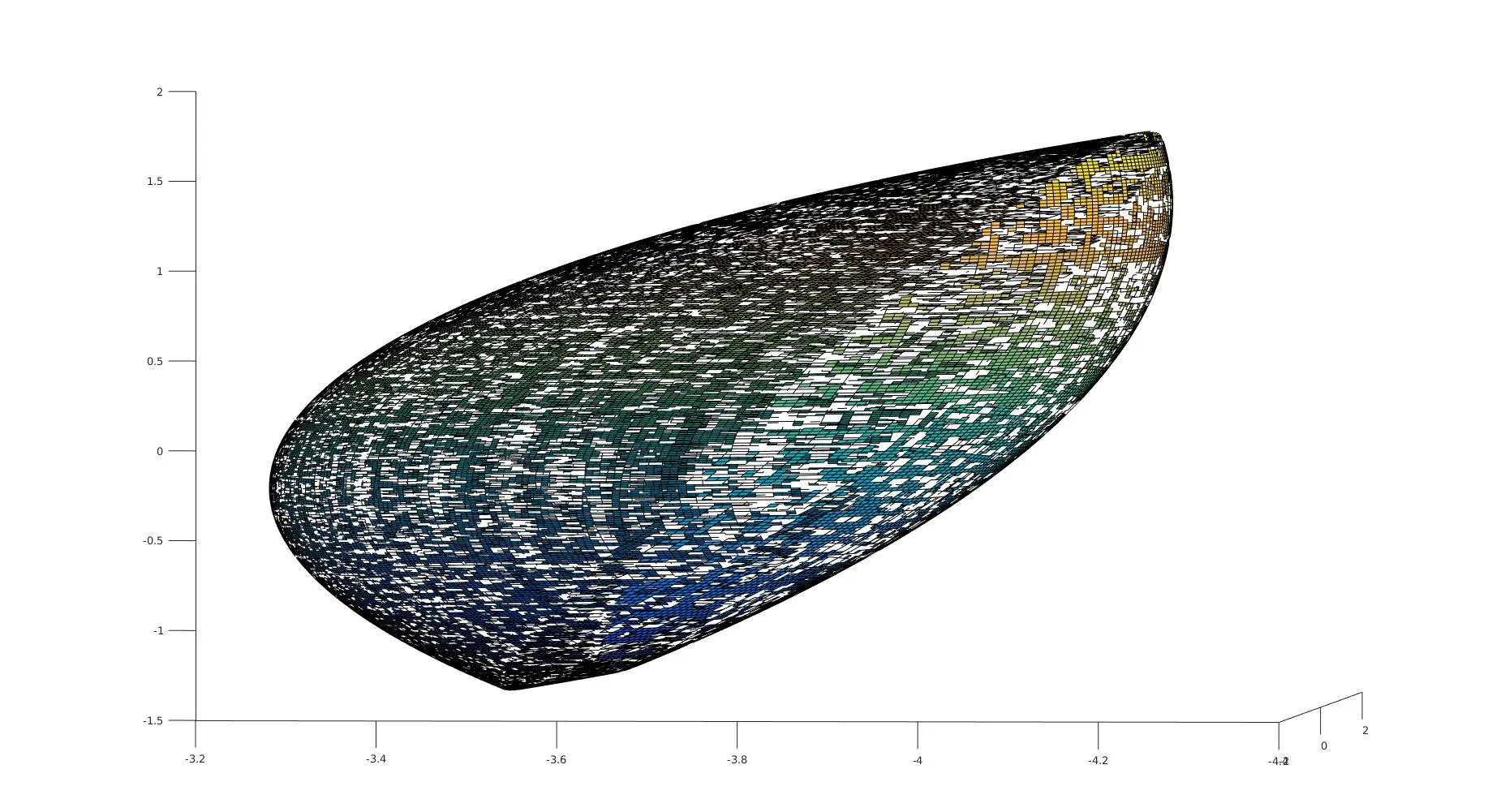
6 个球体的交集:
实际的 6 个球体:
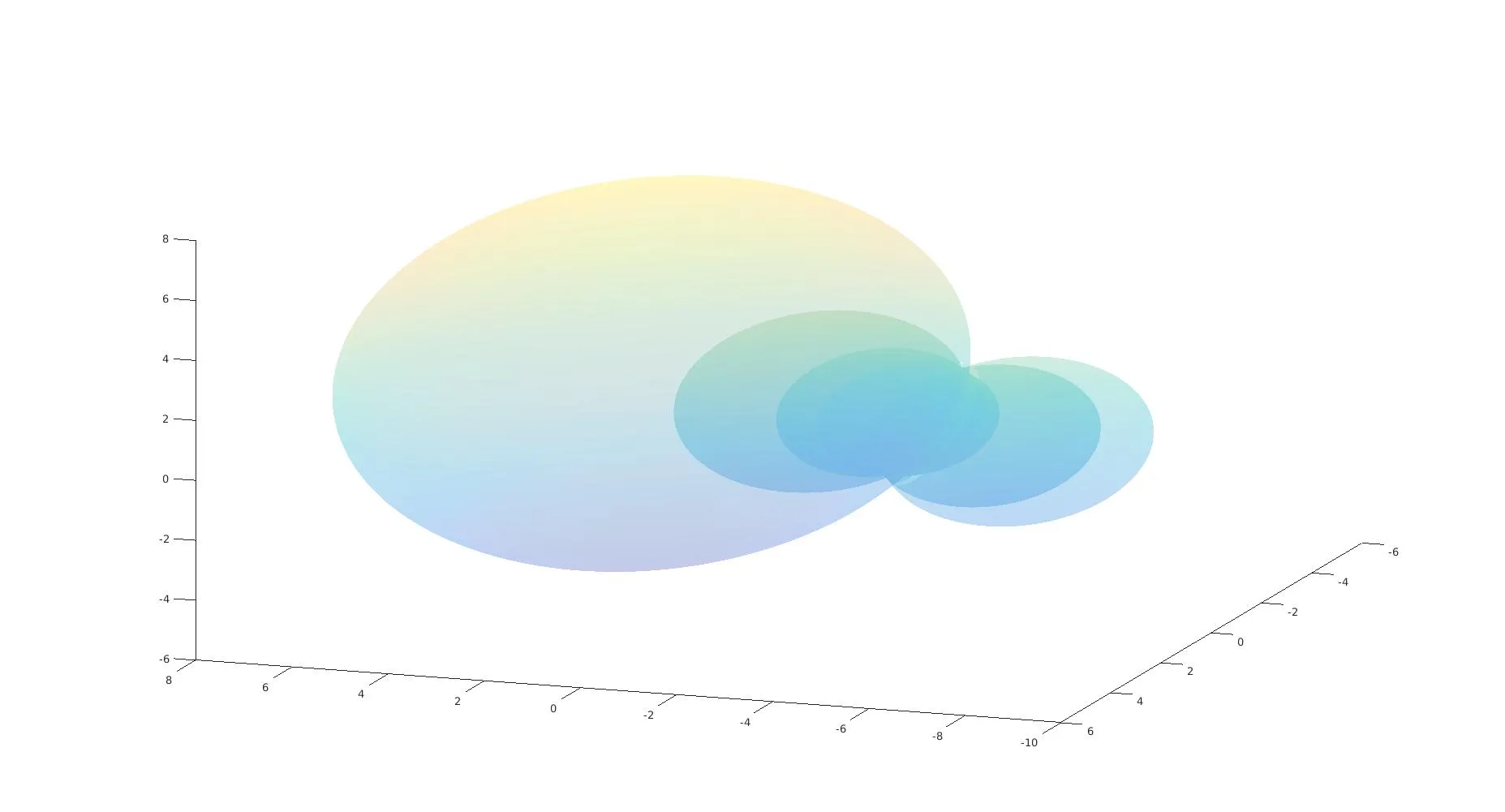
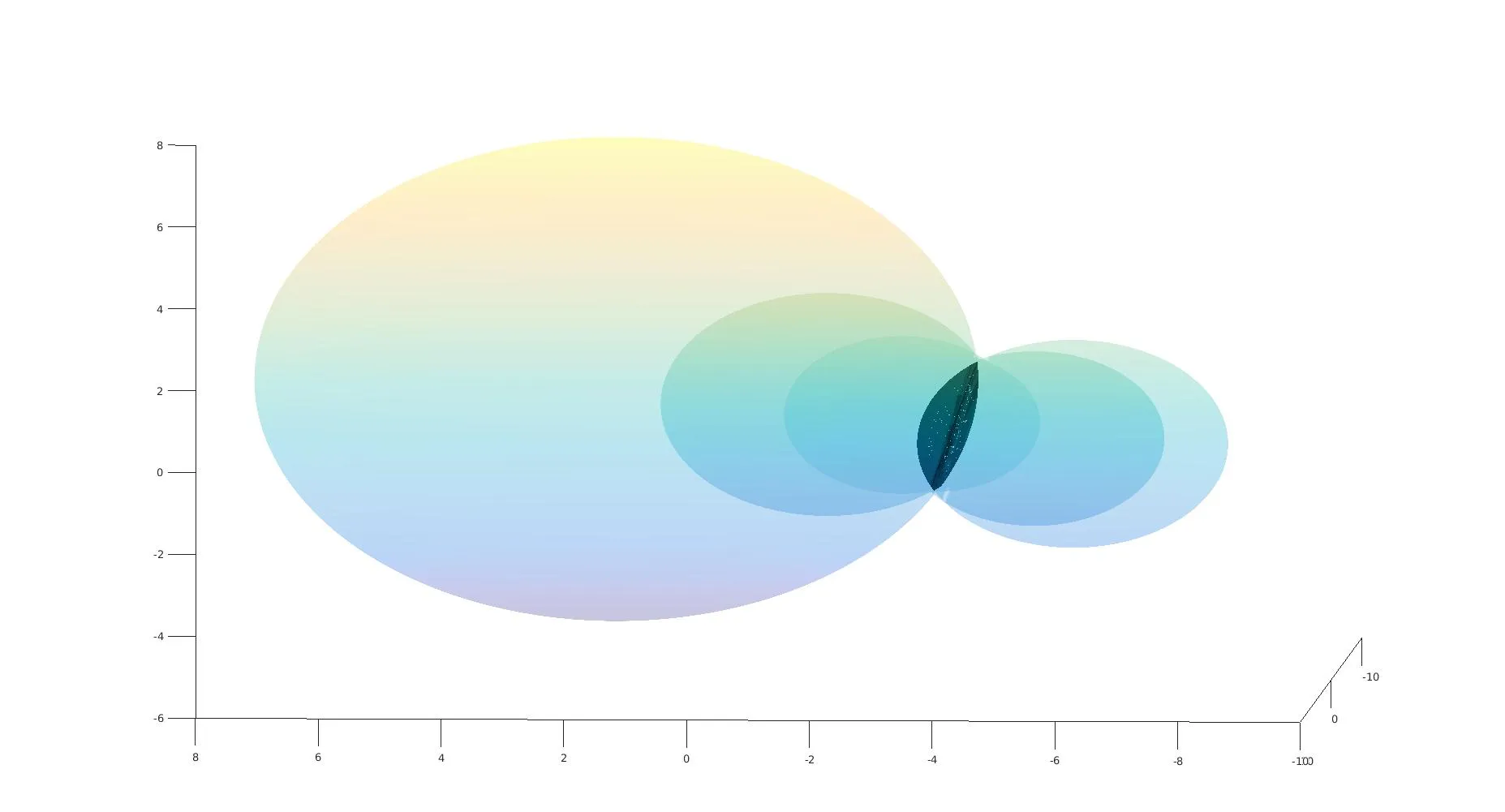
下面,我将两者结合起来,让您可以看到球体的交集。
对于这些示例:
centers =
-0.0065 -0.3383 -0.1738 -0.2513 -0.2268 -0.3115
1.6521 -5.7721 -1.7783 -3.5578 -2.9894 -5.1412
1.2947 -0.2749 0.6781 0.2438 0.4235 -0.1483
dist =
5.8871 2.5280 2.7109 1.6833 1.9164 2.1231
我希望这可以帮助其他想要实现这种效果的人。
%% Determine whether the points of each sphere fall within another sphere中将 0.001 添加到dist(i)。此外,我建议在 surf 中使用...,'EdgeColor','none,...',并添加一个camlight效果更好。 - Ander Biguri