我想知道为什么sympy中的旋转矩阵不符合右手定则:
import sympy as sym
print(sym.rot_axis3(sym.Symbol('q')))
生成输出:
[[ cos(q), sin(q), 0],
[-sin(q), cos(q), 0],
[0, 0, 1]]
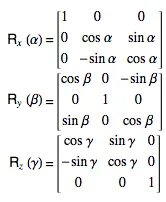
与右手旋转相比:
[[cos(q), -sin(q), 0],
[sin(q), cos(q), 0],
[0, 0, 1]]
将向量逆时针旋转。在我发现问题之前,我花费了几个小时搜索方程式中的错误。
rot_axis2 和 rot_axis1 同样如此。