给定一个由
我们需要回答以下类型的查询:
时间:从
什么是最佳的回答查询的方式?
暴力方法:时间 - O(Q * N)
使用二进制抬升技术的改进解决方案:时间 - O(Q * log(N))
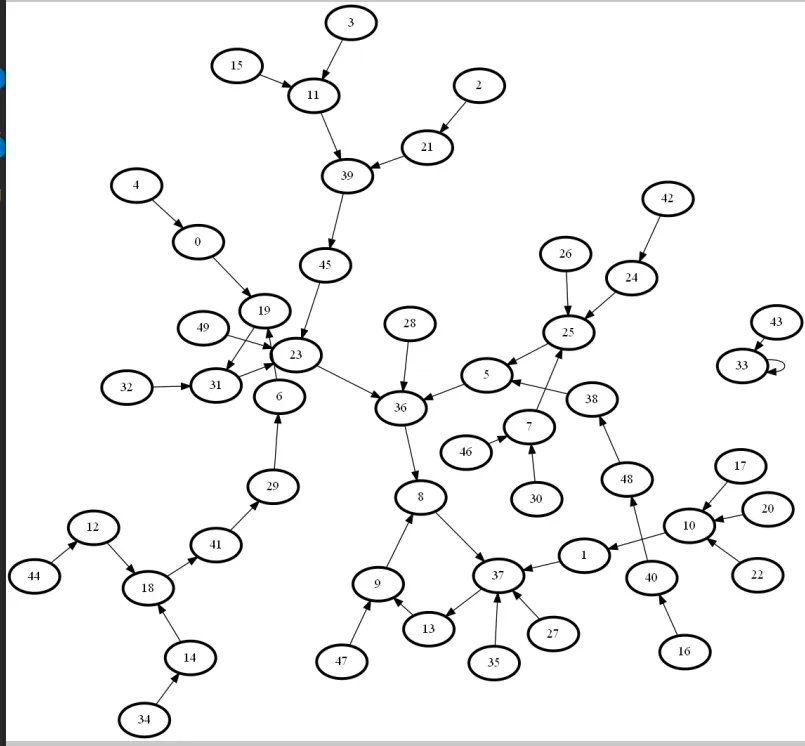
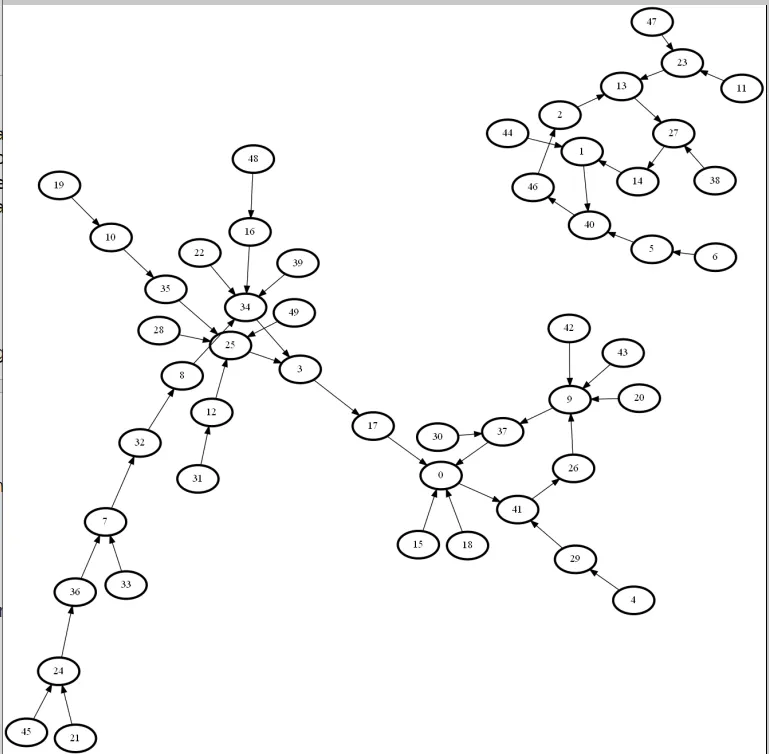
N 个节点组成的图,节点编号为 (1-N),每个节点都恰好有一条指向某个节点的有向边(可以是指向自身)。我们需要回答以下类型的查询:
A, B,询问两个物体在碰撞时所需的时间,其中一个从 A 开始移动,另一个从 B 开始移动。两个物体每次移动 1 个节点,每次移动花费 1 秒。如果它们无法相遇,则返回时间为 -1。时间:从
X 到 Y:每经过 1 个节点需要 1 秒。
限制条件:N, Q <= 10^5 (number of nodes, number of queries).
例子:给定一个图形
A -> B -> C -> D -> E
^ |
K <- F
Query(A, E) : 3 seconds, as at time t = 3 secs they both will be on node D.
Query(C, D) : -1 seconds, as they will never collide.
什么是最佳的回答查询的方式?
暴力方法:时间 - O(Q * N)
使用二进制抬升技术的改进解决方案:时间 - O(Q * log(N))
private static int[] collisionTime(int N, int Q, int[] A, int[][] queries) {
// ancestor matrix : creation time- O(n * log(n))
int M = (int) (Math.ceil(Math.log10(N) / Math.log10(2))) + 1;
int[][] ancestor = new int[N + 1][M];
for(int i = 1; i <= N; i++) {
ancestor[i][0] = A[i]; // 2^0-th ancestor.
}
for(int j = 1; j < M; j++) {
for(int i = 1; i <= N; i++) {
ancestor[i][j] = ancestor[ancestor[i][j-1]][j-1];
}
}
int[] answer = new int[Q];
for(int i = 0; i < Q; i++) {
int u = queries[i][0];
int v = queries[i][1];
answer[i] = timeToCollide(u, v, ancestor);
}
return answer;
}
// using binary lifting: time- O(log(n))
private static int timeToCollide(int u, int v, int[][] ancestor) {
int m = ancestor[0].length;
// edge cases
if(u == v) // already in collision state
return 0;
if(ancestor[u][m-1] != ancestor[v][m-1]) // their top most ancestor is not the same means they cannot collide at all.
return -1;
int t = 0;
for(int j = m - 1; j >=0; j--) {
if(ancestor[u][j] != ancestor[v][j]) {
u = ancestor[u][j];
v = ancestor[v][j];
t += Math.pow(2, j);
}
}
return t + 1;
}
O(N^2 + Q),这与O(Q*N)没有实质性的改进。 - RBarryYoungO(N log N)的时间,然后回答查询需要O(Q log N)的时间。因此总时间复杂度为O((N+Q) log N)。 - RBarryYoungO(N + Q)的平均时间复杂度。对于任意随机结构或随机查询集,它几乎总能达到这个复杂度。然而,对于某些病态结构和非随机查询集(始终匹配,但距离最大),我还没有完全解决。 - RBarryYoung