我想编写一个程序,给定一个由浮点型x、y、z坐标数组表示的3D空间中的点列表,输出该空间中最佳拟合线。这条线可以/应该以单位向量和线上的一点形式表示。
问题是我不知道如何实现。我找到的最接近的方法是这个链接,但说实话我并不理解他是如何从方程推导出其他方程的,而当我们讲到矩阵时,我已经有些迷失了。
是否有简单的2D线性回归的概括方法可用于此,或者是否有人能够解释(数学上)上述链接中的方法如何工作(以及计算使用它来计算最佳拟合线需要做什么)?
我想编写一个程序,给定一个由浮点型x、y、z坐标数组表示的3D空间中的点列表,输出该空间中最佳拟合线。这条线可以/应该以单位向量和线上的一点形式表示。
问题是我不知道如何实现。我找到的最接近的方法是这个链接,但说实话我并不理解他是如何从方程推导出其他方程的,而当我们讲到矩阵时,我已经有些迷失了。
是否有简单的2D线性回归的概括方法可用于此,或者是否有人能够解释(数学上)上述链接中的方法如何工作(以及计算使用它来计算最佳拟合线需要做什么)?
N维线性回归有一个标准公式,如下所示:

其中结果 是大小为n + 1的向量,给出最适合数据的函数的系数。
是大小为n + 1的向量,给出最适合数据的函数的系数。
在你的情况下n = 3。X是一个mx(n + 1)的矩阵,称为设计矩阵,在你的情况下是mx4。构建设计矩阵时,只需将每个数据点坐标值(x1,x2,...)复制到X的一行中,并在每行的第1列上放置数字1。向量y具有与这些坐标相关联的值。项 和
和 是“X的转置”和“X的转置和积的逆”。计算后一项可能需要大量的计算量,因为求矩阵的逆是O(n^3),但对于n = 4的情况而言,只要n小于5000就没有问题。
是“X的转置”和“X的转置和积的逆”。计算后一项可能需要大量的计算量,因为求矩阵的逆是O(n^3),但对于n = 4的情况而言,只要n小于5000就没有问题。
假设你有数据点(6,4,11) = 20, (8,5,15) = 30, (12,9,25) = 50和(2,1,3) = 7。 在这种情况下,

然后你只需要将它们相乘,就可以直接得到。矩阵乘法是简单的,虽然更复杂,但求一个矩阵的逆是相当简单的(可参考此处)。 然而,对于Matlab、Octave和Julia等科学计算语言,只需一行代码即可完成。
julia> X = [1 6 4 11; 1 8 5 15; 1 12 9 25; 1 2 1 3]
4x4 Array{Int64,2}:
1 6 4 11
1 8 5 15
1 12 9 25
1 2 1 3
julia> y = [20;30;50;7]
4-element Array{Int64,1}:
20
30
50
7
julia> T = pinv(X'*X)*X'*y
4-element Array{Float64,1}:
4.0
-5.5
-7.0
7.0
正在验证...
julia> 12*(-5.5) + 9*(-7.0) + 25*(7) + 4
50.0
X = [ 6 4 11; 8 5 15; 12 9 25; 2 1 3]
4x3 Array{Int64,2}:
6 4 11
8 5 15
12 9 25
2 1 3
找出平均值
y = convert(Array{Float64,1},([sum(X[1:4,x]) for x = 1:3])/4')
3-element Array{Float64,1}:
7.0
4.75
13.5
标准化...
julia> Xm = X .- y'
4x3 Array{Float64,2}:
-1.0 -0.75 -2.5
1.0 0.25 1.5
5.0 4.25 11.5
-5.0 -3.75 -10.5
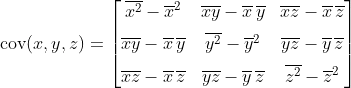
协方差矩阵sigma可以简单地表示为:

其中m是数据点的数量。
在这一步,最好找到一个库,将协方差矩阵作为输入并输出答案。有很多这样的库,以下是其中几个:Python、R、Java,当然还有Octave、Julia以及像R和Matlab一样的另外一个一行代码的函数svd。
对协方差矩阵执行SVD。
(U,S,V) = svd((1/4)*Xm'*Xm);
取第一个组件(对于k维数据,您需要取前k个组件)。
Ureduce = U[:,1]
3-element Array{Float64,1}:
-0.393041
-0.311878
-0.865015
这是将投影误差最小化的线。
你甚至可以恢复原始值的近似,但它们将全部排列在同一条线上并进行投影。连接这些点以获得一条线段。
获取X中每个数据点的降维(因为1-D将只有1个值):
z= Ureduce' * Xm'
1x4 Array{Float64,2}:
2.78949 -1.76853 -13.2384 12.2174
julia> (Ureduce .* z .+ y)'
4x3 Array{Float64,2}:
5.90362 3.88002 11.0871 6 4 11
7.69511 5.30157 15.0298 versus 8 5 15
12.2032 8.87875 24.9514 12 9 25
2.19806 0.939664 2.93176 2 1 3
@WaTeim提供了很好的答案。
这是我的Python代码,适用于需要它的人。与提供的数值示例一起使用。
def regr(X):
y= np.average(X, axis=0)
Xm = X-y
u, s, v = np.linalg.svd((1./X.shape[0])*np.matmul(Xm.T,Xm))
# Extra Credit: Going back
z= np.matmul(u[:,0].T, Xm.T)
c = np.array([z*n for n in u[:,0]])
d = np.array(y.tolist()*c.shape[1]).reshape(c.shape[1],-1).T
e = (c+d).T
return u,s,v
regr(np.array([[6, 4, 11],[8,5,15],[12,9,25],[2,1,3]]))
顺便问一下,有人能告诉我为什么numpy的np.cov()与1./X.shape[0])*np.matmul(Xm.T,Xm)会给出不同的结果吗?


#include<armadillo>
#include<vector>
using namespace arma;
int main()
{
std::vector<vec3> points {{
{1, 1, 1},
{2, 2, 2},
{3, 3, 3}
}};
int N = points.size();
vec3 mean = {0, 0, 0};
mat33 corr(fill::zeros);
for(auto p : points)
{
mean += p;
for(int i = 0; i < 3; i++)
for(int j = i; j < 3; j++)
corr(i, j) += p(i) * p(j);
}
corr /= N;
mean /= N;
mat33 cov {{
{corr(0, 0) - mean(0) * mean(0), corr(0, 1) - mean(0) * mean(1), corr(0, 2) - mean(0) * mean(2)},
{corr(0, 1) - mean(0) * mean(1), corr(1, 1) - mean(1) * mean(1), corr(1, 2) - mean(1) * mean(2)},
{corr(0, 2) - mean(0) * mean(2), corr(1, 2) - mean(2) * mean(1), corr(2, 2) - mean(2) * mean(2)}
}};
vec3 eigval; mat33 eigvec;
eig_sym(eigval, eigvec, cov);
mean.print("\nPoint: ");
eigvec.col(eigval.index_max())
.print("\nDirection:");
}
const { Matrix, solve } = require('ml-matrix');
solve(this.DataX, Matrix.columnVector(this.DataY[0]));
我在 QT 代码中使用这个简单的方法:
QPair<QVector3D, QVector3D> getLineByLeastSquares(const QVector<QVector3D>& points)
{
if (points.size() <= 1)
return QPair<QVector3D, QVector3D>();
QVector3D avg;
for (const QVector3D& p : points)
avg += p;
avg /= static_cast<float>(points.size());
float nX = 0.0F, nY = 0.0F, nZ = 0.0F;
for (const QVector3D& p : points)
{
const QVector3D tmp = p - avg;
nX += tmp.x() * tmp.x();
nY += tmp.x() * tmp.y();
nZ += tmp.x() * tmp.z();
}
return QPair<QVector3D, QVector3D>(avg, QVector3D(nX, nY, nZ).normalized());
}
结果的第一个组件是QPair<QVector3D,QVector3D>,它是线的点,第二个组件是线的法向量。