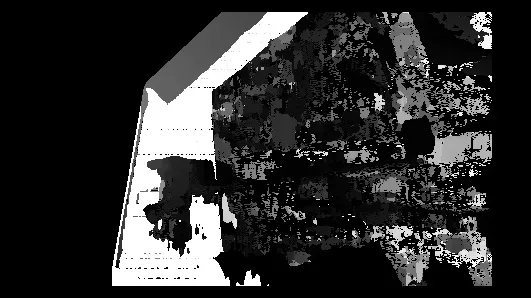
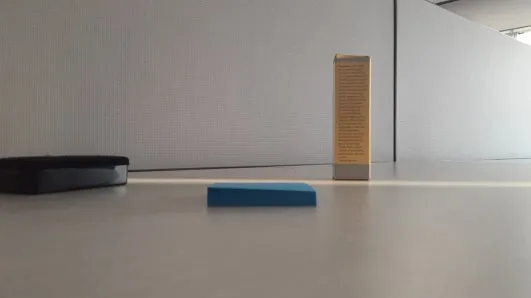
我正在尝试使用StereoBM获取两幅图像的视差图。我尝试了一些示例代码和图像,它们都正常工作。然而,当我尝试使用自己的图像时,我得到了非常糟糕的视差图,非常嘈杂。


我的StereoBM参数
sbm.state->SADWindowSize = 25;
sbm.state->numberOfDisparities = 128;
sbm.state->preFilterSize = 5;
sbm.state->preFilterCap = 61;
sbm.state->minDisparity = -39;
sbm.state->textureThreshold = 507;
sbm.state->uniquenessRatio = 0;
sbm.state->speckleWindowSize = 0;
sbm.state->speckleRange = 8;
sbm.state->disp12MaxDiff = 1;
我的问题是:
- 我的图片有什么问题吗?
- 在进行立体匹配之前,不进行相机标定是否可能得到良好的视差图?我需要在使用StereoBM之前对图像进行校正吗?
谢谢。
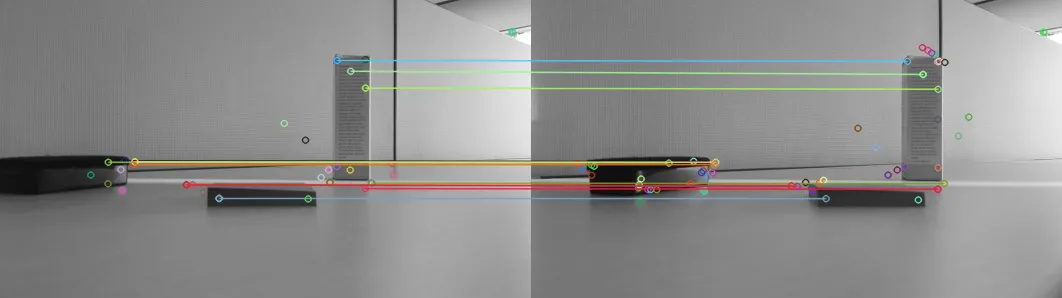
这是我用于校正图像的代码:
Mat img_1 = imread( "image1.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = imread( "image2.jpg", CV_LOAD_IMAGE_GRAYSCALE );
int minHessian = 430;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keypoints_1, keypoints_2;
detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute( img_1, keypoints_1, descriptors_1 );
extractor.compute( img_2, keypoints_2, descriptors_2 );
//-- Step 3: Matching descriptor vectors with a brute force matcher
BFMatcher matcher(NORM_L1, true); //BFMatcher matcher(NORM_L2);
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < matches.size(); i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
std::vector< DMatch > good_matches;
vector<Point2f>imgpts1,imgpts2;
for( int i = 0; i < matches.size(); i++ )
{
if( matches[i].distance <= max(4.5*min_dist, 0.02) ){
good_matches.push_back( matches[i]);
imgpts1.push_back(keypoints_1[matches[i].queryIdx].pt);
imgpts2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
}
std::vector<uchar> status;
cv::Mat F = cv::findFundamentalMat(imgpts1, imgpts2, cv::FM_8POINT, 3., 0.99, status); //FM_RANSAC
Mat H1,H2;
cv::stereoRectifyUncalibrated(imgpts1, imgpts1, F, img_1.size(), H1, H2);
cv::Mat rectified1(img_1.size(), img_1.type());
cv::warpPerspective(img_1, rectified1, H1, img_1.size());
cv::Mat rectified2(img_2.size(), img_2.type());
cv::warpPerspective(img_2, rectified2, H2, img_2.size());
StereoBM sbm;
sbm.state->SADWindowSize = 25;
sbm.state->numberOfDisparities = 128;
sbm.state->preFilterSize = 5;
sbm.state->preFilterCap = 61;
sbm.state->minDisparity = -39;
sbm.state->textureThreshold = 507;
sbm.state->uniquenessRatio = 0;
sbm.state->speckleWindowSize = 0;
sbm.state->speckleRange = 8;
sbm.state->disp12MaxDiff = 1;
Mat disp,disp8;
sbm(rectified1, rectified2, disp);
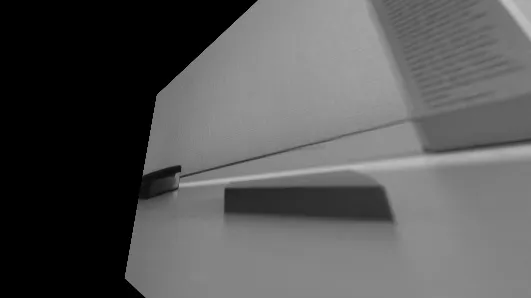
矫正后的图像和视差图在这里