我正在尝试开发一个能够检测道路上车道的程序。我已经尝试过Hough线变换和概率Hough线变换,但是都没有得到我想要的结果。
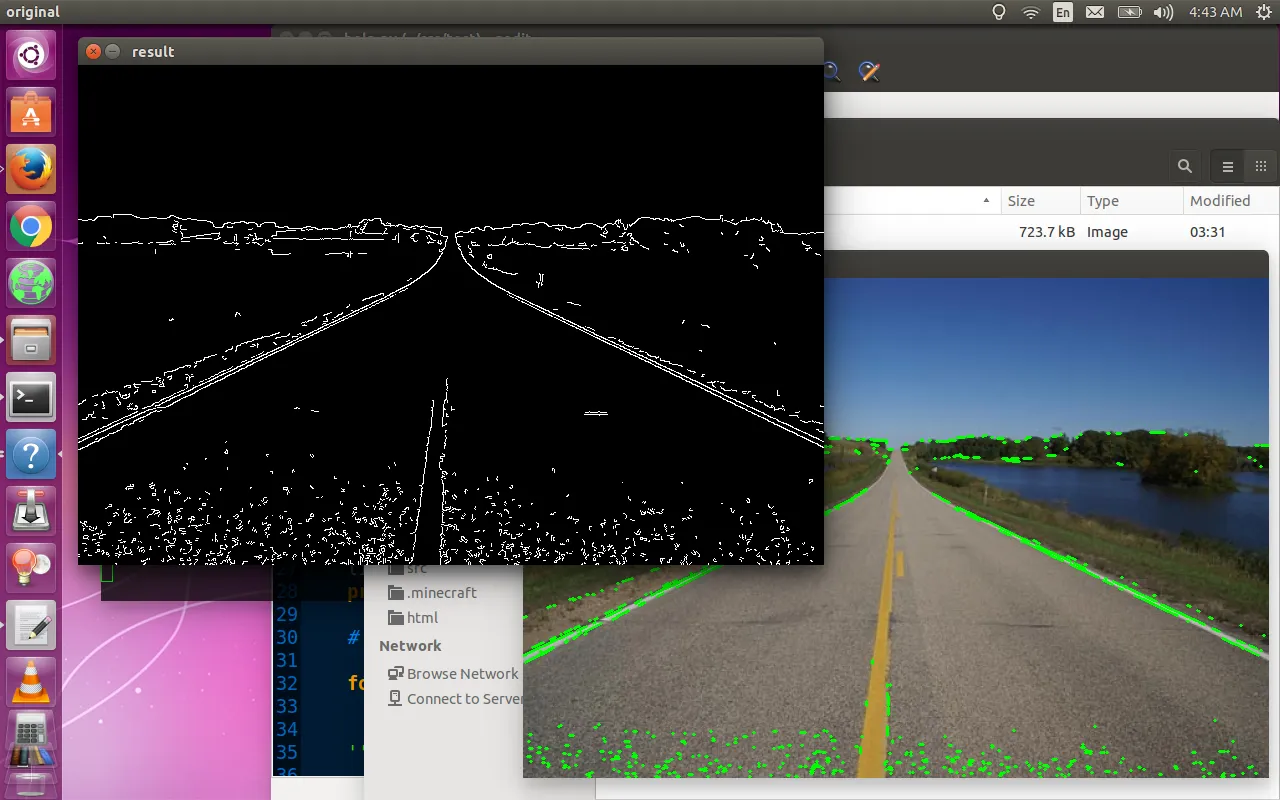
原始图像:

霍夫线变换

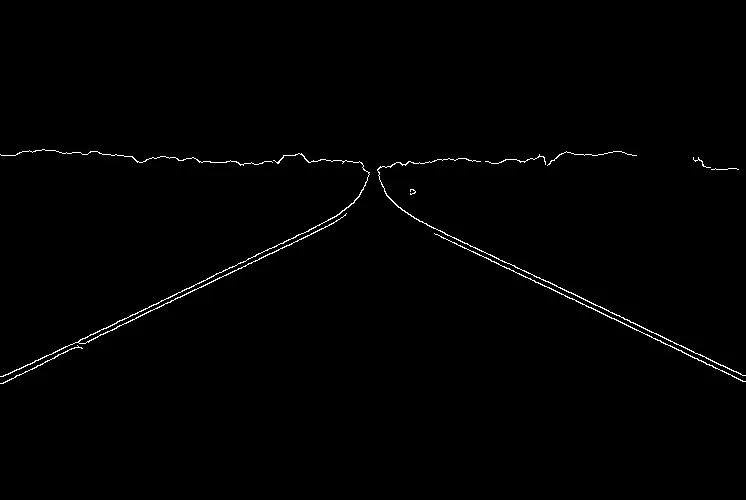
概率霍夫变换

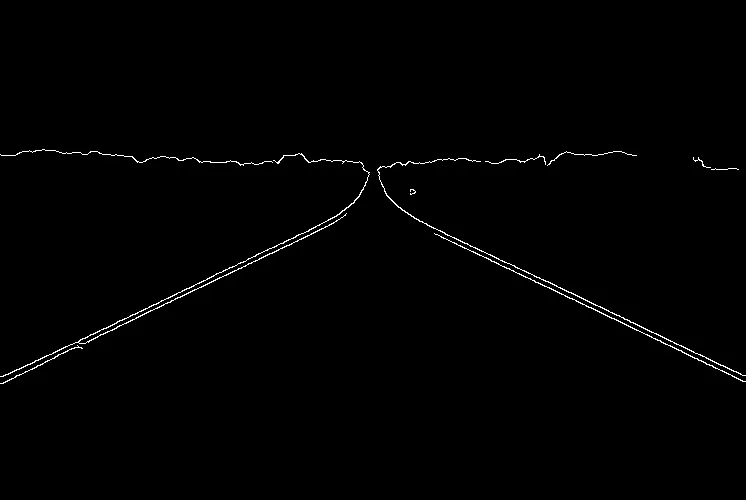
我还尝试了概率霍夫线变换,用于车道检测的绿色线不像另一个方法那样无限延伸,但它无法标记和检测整个车道。
我正在尝试在这里复制结果(通过Python编写)。
http://www.transistor.io/revisiting-lane-detection-using-opencv.html
我该怎么做才能解决这个问题?
代码:
import numpy as np
import cv2
from matplotlib import pyplot as plt
from PIL import Image
import imutils
def invert_img(img):
img = (255-img)
return img
def canny(imgray):
imgray = cv2.GaussianBlur(imgray, (5,5), 200)
canny_low = 5
canny_high = 150
thresh = cv2.Canny(imgray,canny_low,canny_high)
return thresh
def filtering(imgray):
thresh = canny(imgray)
minLineLength = 1
maxLineGap = 1
lines = cv2.HoughLines(thresh,1,np.pi/180,0)
#lines = cv2.HoughLinesP(thresh,2,np.pi/180,100,minLineLength,maxLineGap)
print lines.shape
# Code for HoughLinesP
'''
for i in range(0,lines.shape[0]):
for x1,y1,x2,y2 in lines[i]:
cv2.line(img,(x1,y1),(x2,y2),(0,255,0),2)
'''
# Code for HoughLines
for i in range(0,5):
for rho,theta in lines[i]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),2)
return thresh
img = cv2.imread('images/road_0.bmp')
imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img = imutils.resize(img, height = 500)
imgray = imutils.resize(imgray, height = 500)
thresh = filtering(imgray)
cv2.imshow('original', img)
cv2.imshow('result', thresh)
cv2.waitKey(0)