有没有使用OpenCV进行反卷积的方法?
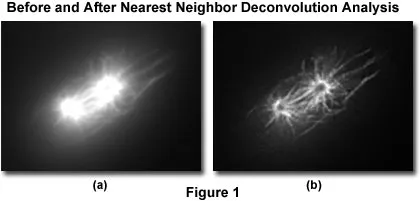
我对这里展示的改进印象深刻。
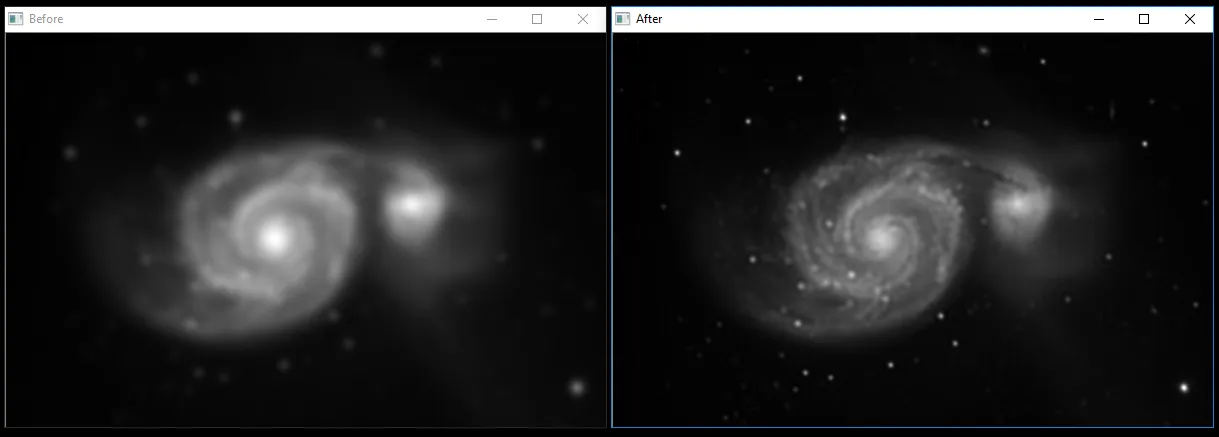
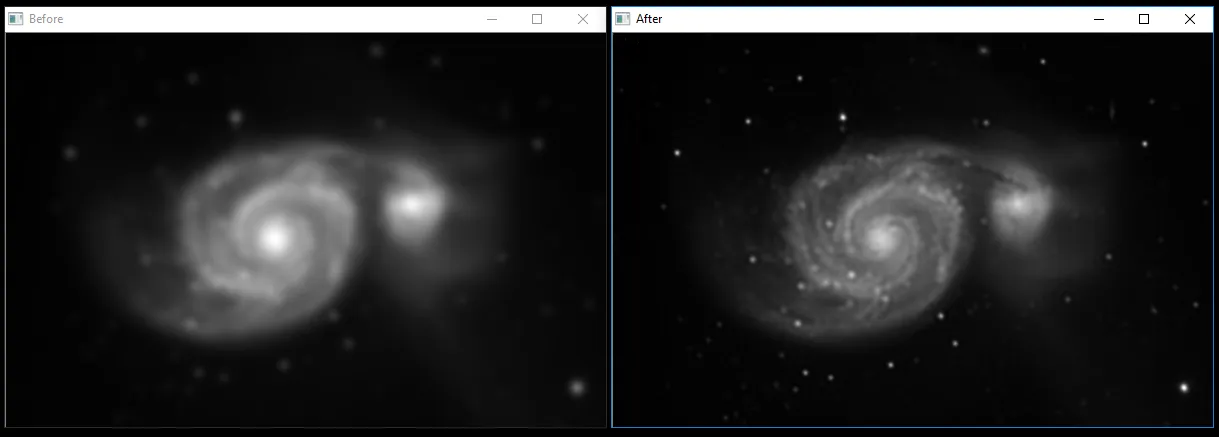
编辑(奖励的额外信息):
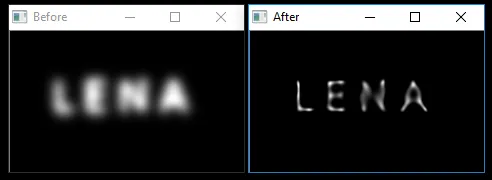
我仍然没有弄清楚如何实现反卷积。这段代码帮助我锐化图像,但我认为反卷积可能会做得更好。
void ImageProcessing::sharpen(QImage & img)
{
IplImage* cvimg = createGreyFromQImage( img );
if ( !cvimg ) return;
IplImage* gsimg = cvCloneImage(cvimg );
IplImage* dimg = cvCreateImage( cvGetSize(cvimg), IPL_DEPTH_8U, 1 );
IplImage* outgreen = cvCreateImage( cvGetSize(cvimg), IPL_DEPTH_8U, 3 );
IplImage* zeroChan = cvCreateImage( cvGetSize(cvimg), IPL_DEPTH_8U, 1 );
cvZero(zeroChan);
cv::Mat smat( gsimg, false );
cv::Mat dmat( dimg, false );
cv::GaussianBlur(smat, dmat, cv::Size(0, 0), 3);
cv::addWeighted(smat, 1.5, dmat, -0.5 ,0, dmat);
cvMerge( zeroChan, dimg, zeroChan, NULL, outgreen);
img = IplImage2QImage( outgreen );
cvReleaseImage( &gsimg );
cvReleaseImage( &cvimg );
cvReleaseImage( &dimg );
cvReleaseImage( &outgreen );
cvReleaseImage( &zeroChan );
}
希望能得到有用的提示!
{kind=link}