这是我在Stack上发布的第一篇文章,对于我的笨拙,请提前道歉。如果可以,敬请告知如何改进我的问题。
► 我想要实现的目标(长期目标):
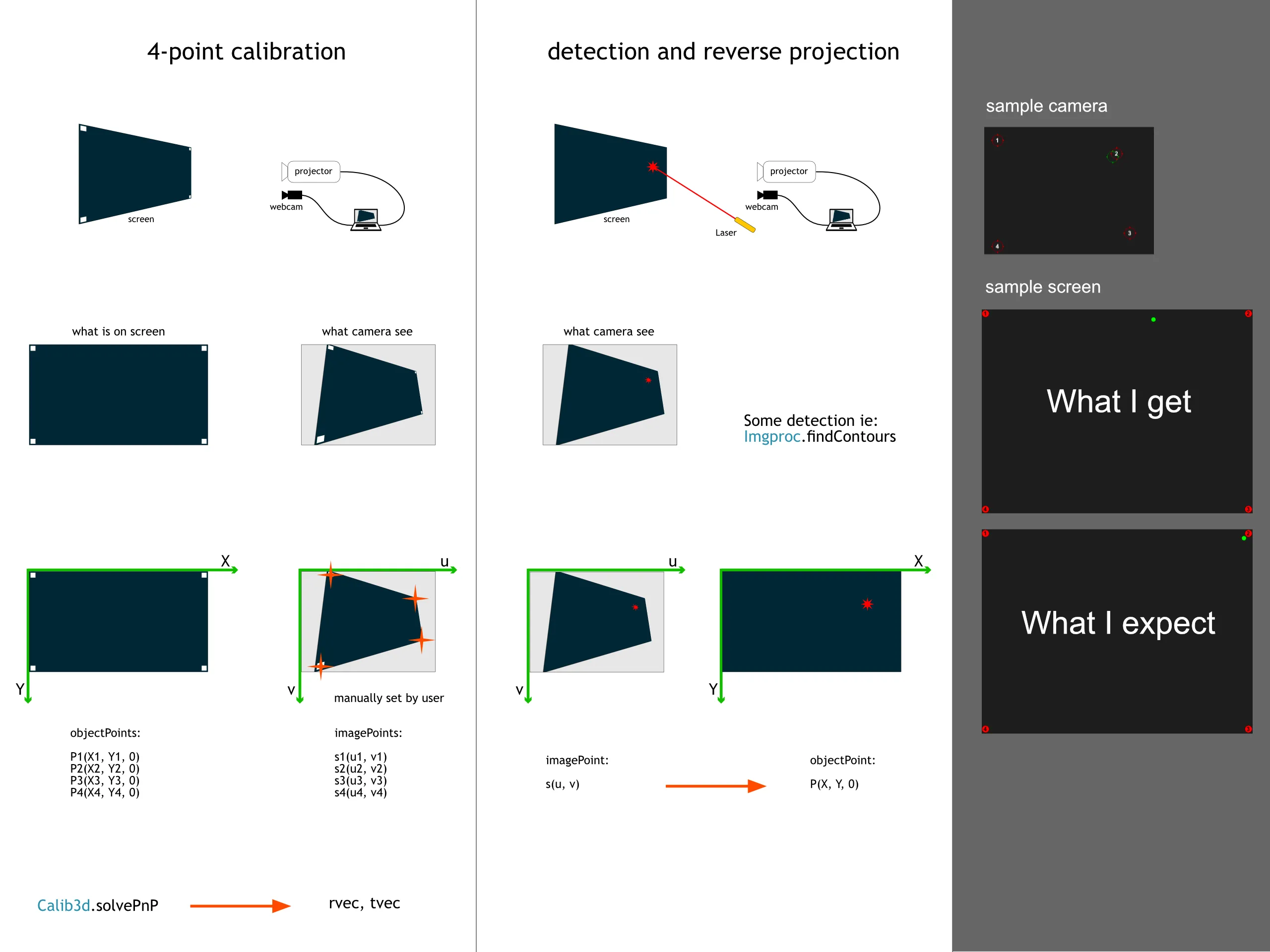
我想使用OpenCV for Unity和激光指针来操作我的Unity3d演示。
我相信一张图片胜过千言万语,所以这应该说明问题:
► 问题是什么:
我尝试从相机视图(某种梯形)进行简单的四点校准(投影)到平面空间。
我认为这应该是非常基础和容易的事情,但我没有使用OpenCV的经验,也无法使其工作。
► 示例:
我制作了一个更简单的示例,没有任何激光检测和其他杂项。只有4个点的梯形,我试图将其重新投影到平面空间。
链接到整个示例项目:https://1drv.ms/u/s!AiDsGecSyzmuujXGQUapcYrIvP7b
我的示例中的核心脚本:
using OpenCVForUnity;
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using UnityEngine.UI;
using System;
public class TestCalib : MonoBehaviour
{
public RawImage displayDummy;
public RectTransform[] handlers;
public RectTransform dummyCross;
public RectTransform dummyResult;
public Vector2 webcamSize = new Vector2(640, 480);
public Vector2 objectSize = new Vector2(1024, 768);
private Texture2D texture;
Mat cameraMatrix;
MatOfDouble distCoeffs;
MatOfPoint3f objectPoints;
MatOfPoint2f imagePoints;
Mat rvec;
Mat tvec;
Mat rotationMatrix;
Mat imgMat;
void Start()
{
texture = new Texture2D((int)webcamSize.x, (int)webcamSize.y, TextureFormat.RGB24, false);
if (displayDummy) displayDummy.texture = texture;
imgMat = new Mat(texture.height, texture.width, CvType.CV_8UC3);
}
void Update()
{
imgMat = new Mat(texture.height, texture.width, CvType.CV_8UC3);
Test();
DrawImagePoints();
Utils.matToTexture2D(imgMat, texture);
}
void DrawImagePoints()
{
Point[] pointsArray = imagePoints.toArray();
for (int i = 0; i < pointsArray.Length; i++)
{
Point p0 = pointsArray[i];
int j = (i < pointsArray.Length - 1) ? i + 1 : 0;
Point p1 = pointsArray[j];
Imgproc.circle(imgMat, p0, 5, new Scalar(0, 255, 0, 150), 1);
Imgproc.line(imgMat, p0, p1, new Scalar(255, 255, 0, 150), 1);
}
}
private void DrawResults(MatOfPoint2f resultPoints)
{
Point[] pointsArray = resultPoints.toArray();
for (int i = 0; i < pointsArray.Length; i++)
{
Point p = pointsArray[i];
Imgproc.circle(imgMat, p, 5, new Scalar(255, 155, 0, 150), 1);
}
}
public void Test()
{
float w2 = objectSize.x / 2F;
float h2 = objectSize.y / 2F;
/*
objectPoints = new MatOfPoint3f(
new Point3(-w2, -h2, 0),
new Point3(w2, -h2, 0),
new Point3(-w2, h2, 0),
new Point3(w2, h2, 0)
);
*/
objectPoints = new MatOfPoint3f(
new Point3(0, 0, 0),
new Point3(objectSize.x, 0, 0),
new Point3(objectSize.x, objectSize.y, 0),
new Point3(0, objectSize.y, 0)
);
imagePoints = GetImagePointsFromHandlers();
rvec = new Mat(1, 3, CvType.CV_64FC1);
tvec = new Mat(1, 3, CvType.CV_64FC1);
rotationMatrix = new Mat(3, 3, CvType.CV_64FC1);
double fx = webcamSize.x / objectSize.x;
double fy = webcamSize.y / objectSize.y;
double cx = 0; // webcamSize.x / 2.0f;
double cy = 0; // webcamSize.y / 2.0f;
cameraMatrix = new Mat(3, 3, CvType.CV_64FC1);
cameraMatrix.put(0, 0, fx);
cameraMatrix.put(0, 1, 0);
cameraMatrix.put(0, 2, cx);
cameraMatrix.put(1, 0, 0);
cameraMatrix.put(1, 1, fy);
cameraMatrix.put(1, 2, cy);
cameraMatrix.put(2, 0, 0);
cameraMatrix.put(2, 1, 0);
cameraMatrix.put(2, 2, 1.0f);
distCoeffs = new MatOfDouble(0, 0, 0, 0);
Calib3d.solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec);
Mat uv = new Mat(3, 1, CvType.CV_64FC1);
uv.put(0, 0, dummyCross.anchoredPosition.x);
uv.put(1, 0, dummyCross.anchoredPosition.y);
uv.put(2, 0, 0);
Calib3d.Rodrigues(rvec, rotationMatrix);
Mat P = rotationMatrix.inv() * (cameraMatrix.inv() * uv - tvec);
Vector2 v = new Vector2((float)P.get(0, 0)[0], (float)P.get(1, 0)[0]);
dummyResult.anchoredPosition = v;
}
private MatOfPoint2f GetImagePointsFromHandlers()
{
MatOfPoint2f m = new MatOfPoint2f();
List<Point> points = new List<Point>();
foreach (RectTransform handler in handlers)
{
Point p = new Point(handler.anchoredPosition.x, handler.anchoredPosition.y);
points.Add(p);
}
m.fromList(points);
return m;
}
}
感谢您提前的任何帮助。