我有一台PointGrey Ladybug3相机。它是一款全景(多)相机(5个相机实现360度和1个相机向上拍摄)。
我已经完成了所有的校准和矫正,因此从6张图像的所有像素中得到的是它们相对于全局坐标系的3D位置。
现在我要做的是将这些3D点转换为全景图像。最常见的是径向(等距)投影,如下所示:
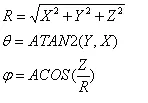
 对于所有的3D点(X,Y,Z),可以找到theta和phi坐标,如下所示:
对于所有的3D点(X,Y,Z),可以找到theta和phi坐标,如下所示:
 我的问题是,是否可能使用opencv自动完成这个过程?或者如果我手动执行这个操作,将这堆像素转换为theta、phi坐标的最佳方法是什么?
官方的Ladybug SDK使用OpenGL进行所有这些操作,但我想知道是否可能在opencv中完成这些操作。
我的问题是,是否可能使用opencv自动完成这个过程?或者如果我手动执行这个操作,将这堆像素转换为theta、phi坐标的最佳方法是什么?
官方的Ladybug SDK使用OpenGL进行所有这些操作,但我想知道是否可能在opencv中完成这些操作。
谢谢, Josep
对于所有的3D点(X,Y,Z),可以找到theta和phi坐标,如下所示:
我的问题是,是否可能使用opencv自动完成这个过程?或者如果我手动执行这个操作,将这堆像素转换为theta、phi坐标的最佳方法是什么?
官方的Ladybug SDK使用OpenGL进行所有这些操作,但我想知道是否可能在opencv中完成这些操作。谢谢, Josep