OpenCV函数
请描述和说明该算法的高级操作,以及其输入和输出。
convexityDefects()中使用的算法是什么,用于计算轮廓的凸缺陷?请描述和说明该算法的高级操作,以及其输入和输出。
convexityDefects()中使用的算法是什么,用于计算轮廓的凸缺陷?contour定义原始轮廓(下图中的红色)convexhull定义与该轮廓对应的凸包(下图中的蓝色)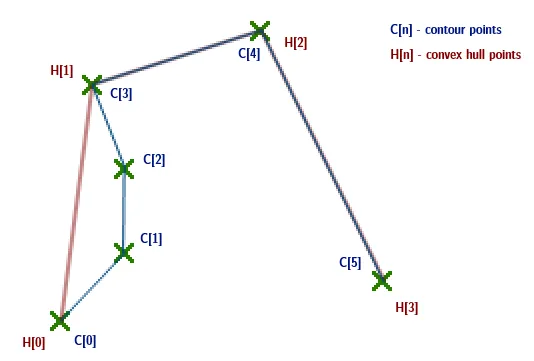
算法的工作方式如下:
如果轮廓或凸包只包含3个或更少的点,则轮廓始终是凸的,不需要进行进一步处理。该算法确保访问轮廓和凸包的方向相同。
N.B .:在进一步说明中,我假设它们的方向相同,并忽略有关将浮点深度表示为整数的详细信息。
然后,对于凸包的每一对相邻点(H [i] ,H [i + 1] ),定义凸包的一条边,计算位于H [i] 和H [i + 1] 之间的轮廓上的每个点C [n]与该边的距离(不包括C [n] == H [i + 1] )。如果距离大于零,则存在一个缺陷。当存在缺陷时,记录i,i + 1,最大距离和最大距离所在的轮廓点的索引(n)。
距离的计算方式如下:
dx0 = H[i+1].x - H[i].x
dy0 = H[i+1].y - H[i].y
if (dx0 is 0) and (dy0 is 0) then
scale = 0
else
scale = 1 / sqrt(dx0 * dx0 + dy0 * dy0)
dx = C[n].x - H[i].x
dy = C[n].y - H[i].y
distance = abs(-dy0 * dx + dx0 * dy) * scale
用向量表示可能更易于理解:
C: 从H[i]到C[n]的缺陷向量H: 从H[i]到H[i+1]的凸壳边缘向量H_rot: H旋转90度得到的凸壳边缘向量U_rot: H_rot方向的单位向量H的组成部分是[dx0, dy0],因此旋转90度得到[-dy0, dx0]。
scale用于从H_rot找到U_rot,但因为除法比乘法计算量大,所以使用倒数进行优化。在循环遍历C[n]之前就预先计算好,以避免每次迭代重新计算。
|H| = sqrt(dx0 * dx0 + dy0 * dy0)
U_rot = H_rot / |H| = H_rot * scale
然后,C和U_rot之间的点积给出了从缺陷点到凸壳边缘的垂直距离,并使用abs()在任何方向上得到正数大小。
distance = abs(U_rot.C) = abs(-dy0 * dx + dx0 * dy) * scale
在上图所示的场景中,在第一次迭代中,边由H[0]和H[1]定义。这个边缘的轮廓点是C[0],C[1]和C[2](因为C[3] == H[1])。
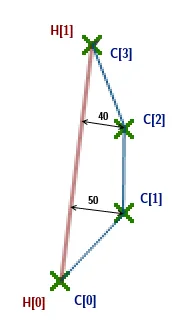
C[1]和C[2]处有缺陷。在C[1]处最深,因此算法将记录(0, 1, 1, 50)。
下一个边缘由H[1]和H[2]定义,相应的轮廓点是C[3]。没有缺陷存在,因此不记录任何内容。
下一个边由H[2]和H[3]定义,相应的轮廓点是C[4]。没有缺陷存在,因此不记录任何内容。
由于C[5] == H[3],可以忽略最后一个轮廓点--那里不可能有缺陷。
H [i]到每个C [n]的向量投影到从H [i]到H [i+1]的凸包段方向上的单位向量中形成的点积,并且已经旋转了90°(因此使用了“scale”和“dx0”<->“dy0”交换与符号更改)。 - rob3c