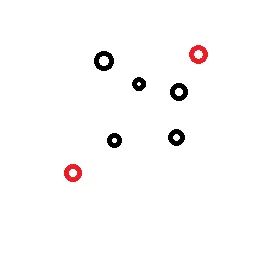
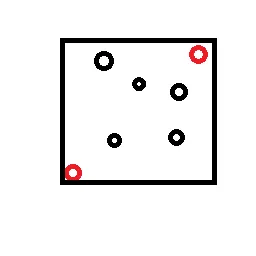
我有一组3D点或小球,需要在Unity 3D中使用最小的三维盒子将其包围。如果封闭盒只能移动和缩放,则解决方案相当简单,只需迭代所有点并封装每个点即可。但我还需要找到盒子的最佳朝向。因此,为了说明ASCII问题,考虑一个基本的2D场景,只有两个点:
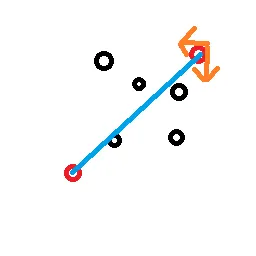
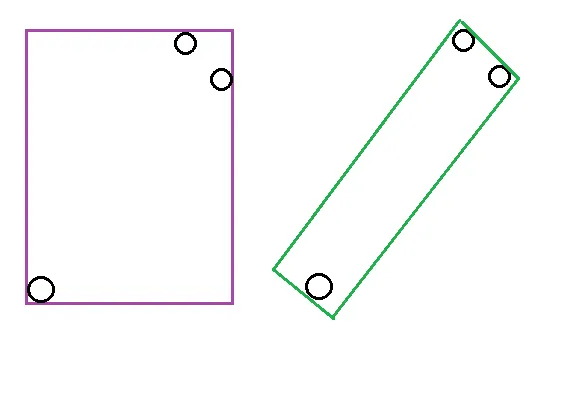
使用常规的增长边界框,您最终会得到一个包含大多数空白空间的非常大的外接框,而在这种情况下,我需要一个非常细且绕Z轴旋转约45度的框。基本上只是连接两个点的直线。
但我不知道需要将多少个点分组在一起。并且如前所述,它必须在3D中工作。
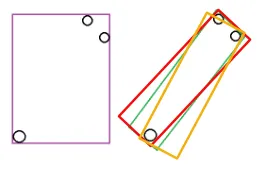
到目前为止,我只尝试了基本方法,其中我不旋转封装框以获得最佳匹配。结果与我需要的相差甚远。
我正在考虑一种基于遗传算法的蛮力方法,其中我生成大量随机框,并简单地选择面积最小但仍然包含所有点的那个。但是,那太慢了。
Y
| * (0,1)
|
|
|
| * (1,0)
-------------------- X
使用常规的增长边界框,您最终会得到一个包含大多数空白空间的非常大的外接框,而在这种情况下,我需要一个非常细且绕Z轴旋转约45度的框。基本上只是连接两个点的直线。
但我不知道需要将多少个点分组在一起。并且如前所述,它必须在3D中工作。
到目前为止,我只尝试了基本方法,其中我不旋转封装框以获得最佳匹配。结果与我需要的相差甚远。
我正在考虑一种基于遗传算法的蛮力方法,其中我生成大量随机框,并简单地选择面积最小但仍然包含所有点的那个。但是,那太慢了。
GameObject go = points[0];
Bounds b = new Bounds(go.transform.position,go.transform.localScale);
for (int i=1;i<points.Count;i++)
{
go = points[i];
b.Encapsulate(new Bounds(go.transform.position, go.transform.localScale));
}
GameObject containingBox = Instantiate(boxPrefab);
containingBox.transform.position = b.center;
containingBox.transform.localScale = b.size;
containingBox.transform.rotation= Quaternion.Identity; //How to calculate?
Joseph O'Rourke minimal volume algorithm.. 这里提到了一些替代方案 here。 - derHugo