我已经将这个示例翻译成了Python。
我的代码如下:
我的代码如下:
import numpy
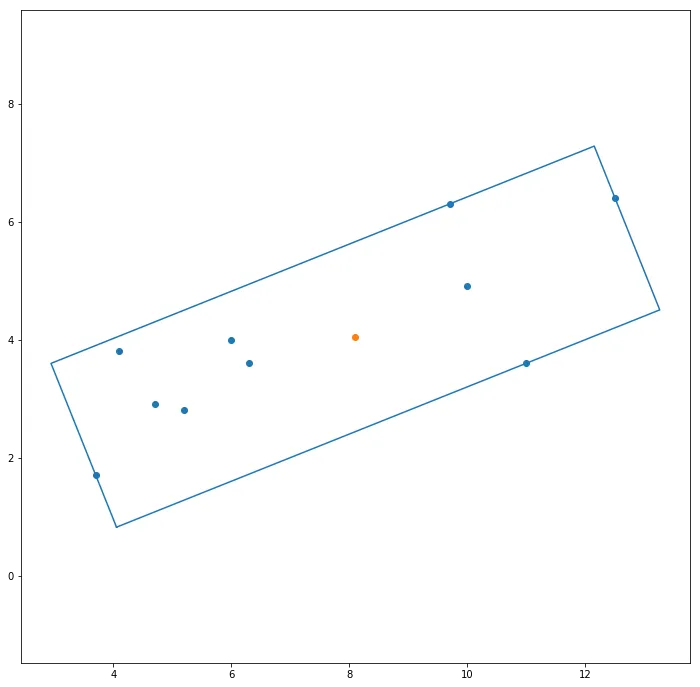
a = numpy.array([(3.7, 1.7), (4.1, 3.8), (4.7, 2.9), (5.2, 2.8), (6.0,4.0), (6.3, 3.6), (9.7, 6.3), (10.0, 4.9), (11.0, 3.6), (12.5, 6.4)])
ca = numpy.cov(a,y = None,rowvar = 0,bias = 1)
print ca
v, vect = numpy.linalg.eig(ca)
tvect = numpy.transpose(vect)
print tvect
变量ca在这个例子中等同于协方差矩阵,而tvect则等同于特征向量。
请问我需要做些什么来完成这个列表并建立边界框呢?
通常而言,这个列表对于三维点集也是完全相同的吗? 谢谢!