因为代码是用 Mathematica 而不是 C#,所以这个答案是故事的一部分,但是所有的数学(或许有一个小例外)都应该相对容易地转换到任何语言。
所提出的基本方法是:
- 将三个点(A、B、C)投影到这些点所在的平面上。它的法线应为 AB x BC。这将问题从三维降为二维。
- 使用您喜欢的技术找到通过三个投影点的圆的中心。
- 将圆的中心反投影回三维空间。
- 使用适当的球形插值策略(示例中使用了 slerp,但我认为最好使用四元数)。
唯一需要注意的是,您需要确定旋转的方向。我相信有更聪明的方法,但是只有两种选择,拒绝测试就足够了。我使用了 reduce,但是您可能需要做一些稍微不同的事情来在 C# 中实现。
不能保证这是最稳定或最健壮的方法,也不能保证没有遗漏任何边角情况。
Perp2d[v_] := {-v[[2]], v[[1]]};
slerp[p0_, p1_, t_, rev_] :=
Module[{\[CapitalOmega], v},
\[CapitalOmega] = ArcCos[Dot[p0, p1]];
\[CapitalOmega] =
If[rev == 0, 2 Pi - \[CapitalOmega], \[CapitalOmega]];
v = (Sin[(1 - t) \[CapitalOmega]]/
Sin[\[CapitalOmega]]) p0 + (Sin[t \[CapitalOmega]]/
Sin[\[CapitalOmega]]) p1;
Return[v]
];
IntersectionLineLine[{x1_, y1_}, {x2_, y2_}, {x3_, y3_}, {x4_, y4_}] :=
Module[{x, y, A, B, C},
A = Det[{{x1, y1}, {x2, y2}}];
B = Det[{{x3, y3}, {x4, y4}}];
C = Det[{{x1 - x2, y1 - y2}, {x3 - x4, y3 - y4}}];
x = Det[{{A, x1 - x2}, {B, x3 - x4}}]/C;
y = Det[{{A, y1 - y2}, {B, y3 - y4}}]/C;
Return[{x, y}]
]
CircleFromThreePoints2D[v1_, v2_, v3_] :=
Module[{v12, v23, mid12, mid23, v12perp, v23perp, c, r},
v12 = v2 - v1;
v23 = v3 - v2;
mid12 = Mean[{v1, v2}];
mid23 = Mean[{v2, v3}];
c = IntersectionLineLine[
mid12, mid12 + Perp2d[v12],
mid23, mid23 + Perp2d[v23]
];
r = Norm[c - v1];
Assert[r == Norm[c - v2]];
Assert[r == Norm[c - v3]];
Return[{c, r}]
]
CircleFromThreePoints3D[v1_, v2_, v3_] :=
Module[{v12, v23, vnorm, b1, b2, va, vb, vc, xc, xr, yc, yr},
v12 = v2 - v1;
v23 = v3 - v2;
vnorm = Cross[v12, v23];
b1 = Normalize[v12];
b2 = Normalize[Cross[v12, vnorm]];
va = {0, 0};
vb = {Dot[v2, b1], Dot[v2, b2]};
vc = {Dot[v3, b1], Dot[v3, b2]};
{xc, xr} = CircleFromThreePoints2D[va, vb, vc];
yc = xc[[1]] b1 + xc[[2]] b2;
yr = Norm[v1 - yc];
Return[{yc, yr, b1, b2}]
]
v1 = {0, 0, 0};
v2 = {5, 3, 7};
v3 = {6, 4, 2};
{yc, yr, b1, b2} = CircleFromThreePoints3D[v1, v2, v3];
path = Function[{t, d},
yc + yr slerp[(v1 - yc)/yr, (v3 - yc)/yr, t, d]];
dirn = If[
TrueQ[Reduce[{path[t, 1] == v2, t >= 0 && t <= 1}, t] == False], 0,
1]
gr1 = ParametricPlot3D[path[t, dirn], {t, 0.0, 1.0}];
gr2 = ParametricPlot3D[Circle3d[b1, b2, yc, yr][t], {t, 0, 2 Pi}];
Show[
gr1,
Graphics3D[Line[{v1, v1 + b1}]],
Graphics3D[Line[{v1, v1 + b2}]],
Graphics3D[Sphere[v1, 0.1]],
Graphics3D[Sphere[v2, 0.1]],
Graphics3D[{Green, Sphere[v3, 0.1]}],
Graphics3D[Sphere[yc, 0.2]],
PlotRange -> Transpose[{yc - 1.2 yr, yc + 1.2 yr}]
]
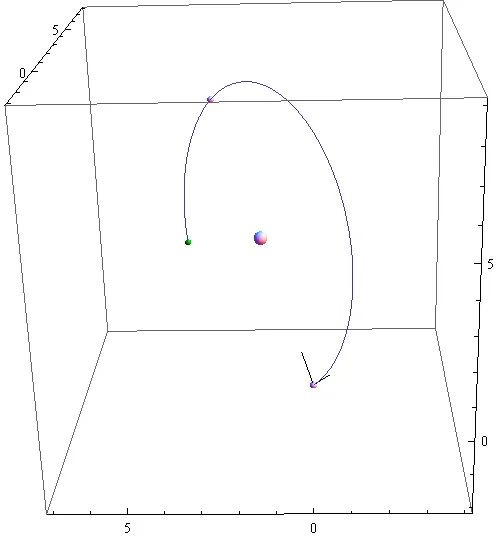
看起来大致如下: