我正在处理下面这张图片的轮廓检测,但由于光线条件不好,在图像显示耀斑处检测不完整。我正在尝试去除它们,以获得更好的轮廓检测结果。
以下是原始图片:
任何建议都将受到欢迎,
谢谢,
Pat
以下是原始图片:

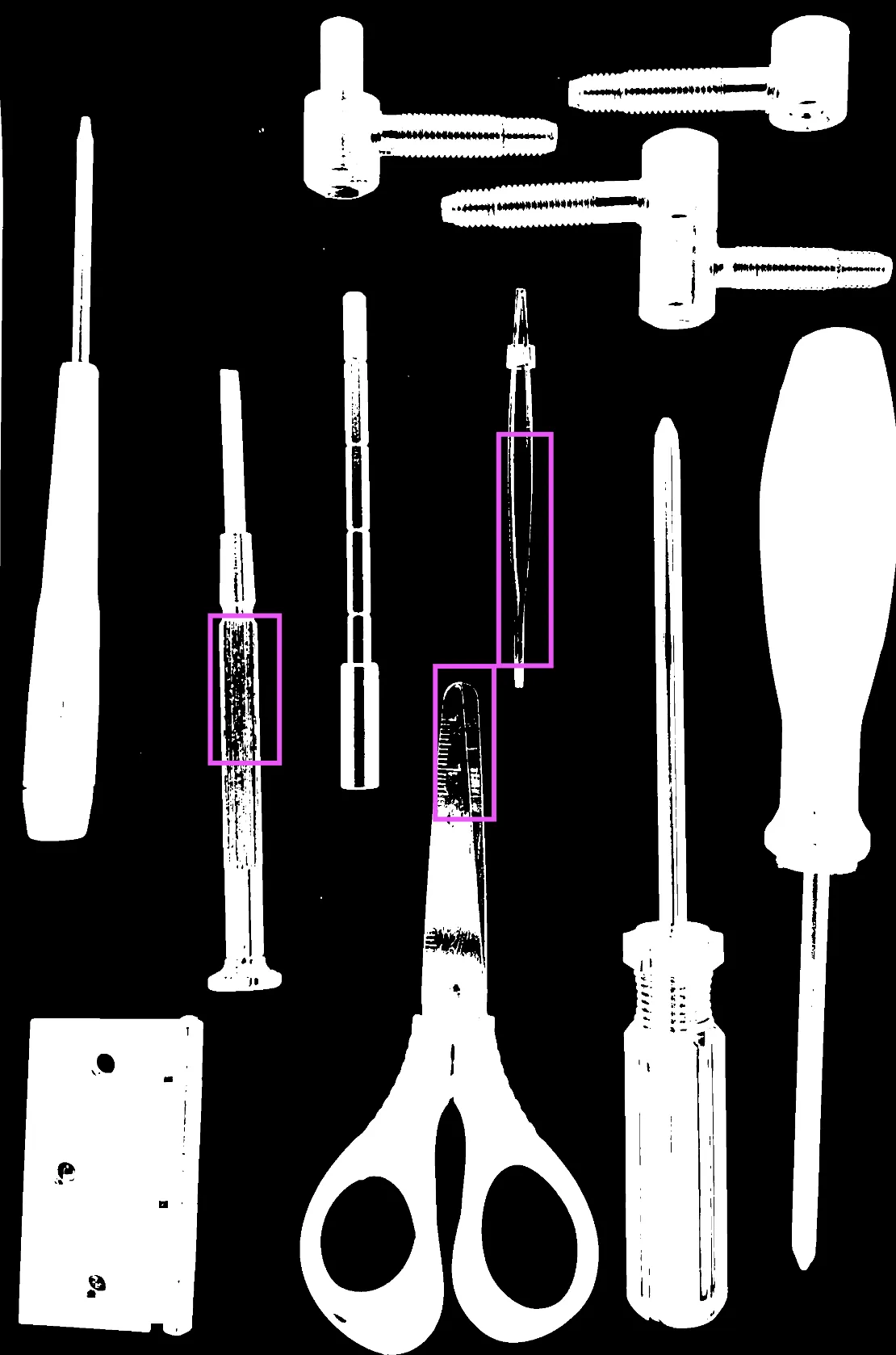

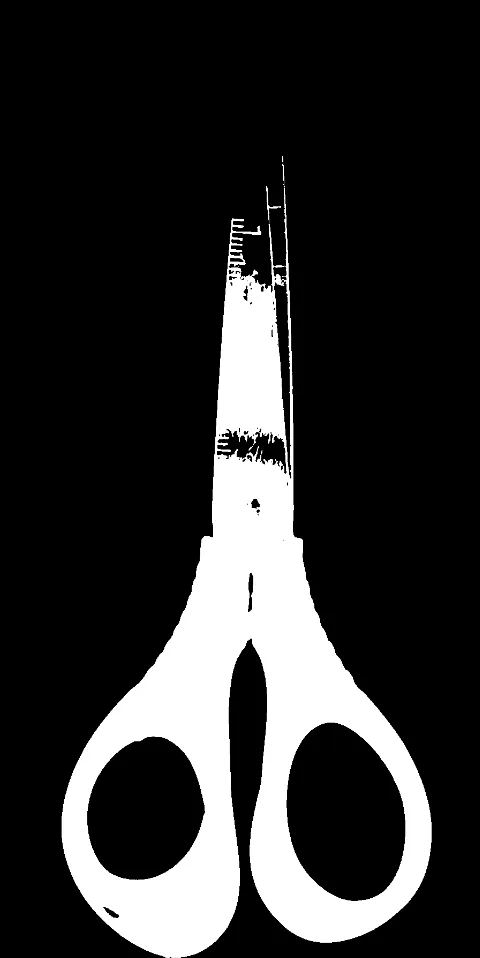

这是我到目前为止所做的:
def getFilteredContours(image, minAreaFilter=20000) -> np.array:
ret = []
ctrs,_ = cv2.findContours(image, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
ctrs = sorted(ctrs, key=cv2.contourArea, reverse=True)
for i, c in enumerate(ctrs):
# Calculate the area of each contour
area = cv2.contourArea(c)
if area < minAreaFilter:
break
ret.append(c)
return ret
birdEye = cv2.imread(impath)
gray = cv2.cvtColor(birdEye, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (5, 5), 0)
threshImg = cv2.threshold(gray, 180, 255, cv2.THRESH_BINARY_INV)[1]
(numLabels, labels, stats, centroids) = cv2.connectedComponentsWithStats(
threshImg, 4, cv2.CV_32S)
#then for each identified component we extract the component and get the contour
filteredIdx = getFilteredLabelIndex(stats)
for labelId in filteredLabelId:
componentMask = (labels == i).astype("uint8") * 255
ctrs, _ = cv2.findContours(image, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
ctrs = sorted(ctrs, key=cv2.contourArea, reverse=True)
ctr = max(ctrs, key=cv2.contourArea)
cv2.drawContours(birdEye, [cntrs], -1, (255, 0, 255), 3)
cv2.imshow("original contour", birdEye)
cv2.waitKey(0)
cv2.destroyAllWindows()
任何建议都将受到欢迎,
谢谢,
Pat

