从物理角度来看:
为了进行插值,您必须对中间点的加速度做出一些假设。
如果您的物理系统相对良好(如汽车或飞机),而不是像弹跳球那样,您可以假设在点之间时间内加速度线性变化。
恒定变化加速运动的向量方程为:
x''[t] = a t + b
除了t以外的所有量都是向量。
对于每个线段,您已经知道v(t = t0)x(t = t0)tfinal和x(tfinal)v(tfinal)。
通过解决微分方程,您可以得到:
Eq 1:
x[t_] := (3 b t^2 Tf + a t^3 Tf - 3 b t Tf^2 - a t Tf^3 - 6 t X0 + 6 Tf X0 + 6 t Xf)/(6 Tf)
通过设置位置和速度的初始和最终限制,可以得到以下结果:
方程2:
a -> (6 (Tf^2 V0 - 2 T0 Tf Vf + Tf^2 Vf - 2 T0 X0 + 2 Tf X0 +
2 T0 Xf - 2 Tf Xf))/(Tf^2 (3 T0^2 - 4 T0 Tf + Tf^2))
b -> (2 (-2 Tf^3 V0 + 3 T0^2 Tf Vf - Tf^3 Vf + 3 T0^2 X0 -
3 Tf^2 X0 - 3 T0^2 Xf + 3 Tf^2 Xf))/(Tf^2 (3 T0^2 - 4 T0 Tf + Tf^2))}}
将等式2的值插入到等式1中,即可得到基于初始和最终位置和速度的点的时间插值。
希望对你有所帮助!
编辑
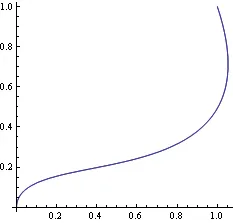
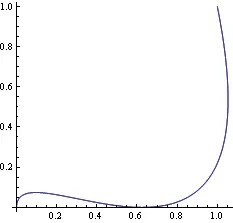
以下是在二维空间中出现了突然速度变化的几个例子(在三维情况下完全相同)。如果初始速度和最终速度相似,则路径会更加“直”。
假设:
X0 = {0, 0}
T0 = 0
如果
V0 = {0, 1}
V0 = {0, 1}
V0 = {0, 1}
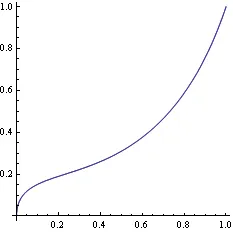
这里有一个动画,您可以看到速度从V0 = {0, 1}变化到Vf = {1, 5}:
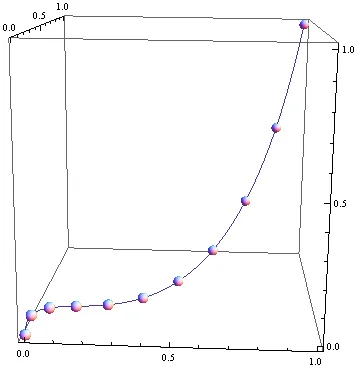
这里您可以看到一个在3D中加速的物体,位置在等间隔时间内被记录:
编辑
一个完整的问题:
为了方便起见,我将使用笛卡尔坐标系。如果您想将经纬度/高度转换为笛卡尔坐标,请执行以下操作:
x = rho sin(theta) cos(phi)
y = rho sin(theta) sin(phi)
z = rho cos(theta)
这里的phi代表经度,theta代表纬度,rho代表你的海拔高度加上地球半径。
假设我们从以下位置出发:
t=0 with coordinates (0,0,0) and velocity (1,0,0)
并以
结束
t=10 with coordinates (10,10,10) and velocity (0,0,1)
我在坐标原点上明确做了一些修改,将原点设置为我的起点。这只是为了得到美观的整数值...
因此,我们用这些数字替换a和b的公式,并得到:
a = {-(3/50), -(3/25), -(3/50)} b = {1/5, 3/5, 2/5}
接下来我们使用公式1,物体的位置由以下公式给出:
p[t] = {1/60 (60 t + 6 t^2 - (3 t^3)/5),
1/60 (18 t^2 - (6 t^3)/5),
1/60 (12 t^2 - (3 t^3)/5)}
这就是全部内容。你可以通过将上述方程中的t替换为其值来获得1到10秒的位置。
动画运行如下:
编辑2
如果您不想干扰垂直加速度(也许因为您的“速度计”没有读取它),您可以将一个恒定速度分配给z轴(考虑到它与Rho轴平行,存在非常小的误差),等于(Zfinal-Zinit)/(Tf-T0),然后在平面上解决问题,忽略高度。