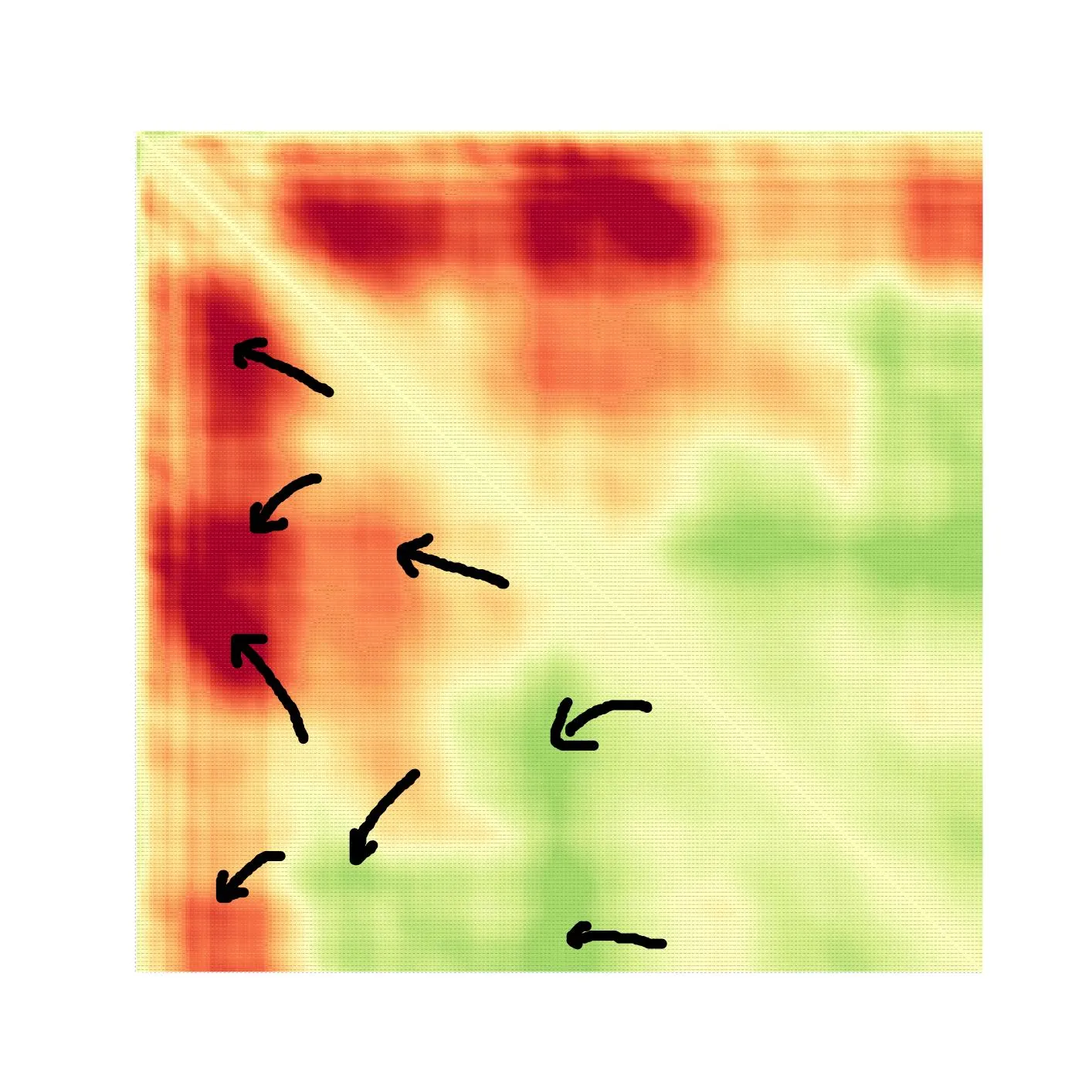
我有一个数据框df,代表一个相关矩阵,带有这个示例极值的热图。每个点显然都有(x,y,value):
 我正在寻找获取局部极值的方法。我尝试了
我正在寻找获取局部极值的方法。我尝试了
在Python中是否有任何返回特定值(阈值)上/下的局部极值的方法?类似于一个包含(x, y, value)的数组?如果没有,您能指导我正确的方向吗?
我正在寻找获取局部极值的方法。我尝试了argrelextrema在单个行上的结果符合预期,但在2D上无效。我还尝试了scipy.signal.find_peaks,但这是针对1D数组的。在Python中是否有任何返回特定值(阈值)上/下的局部极值的方法?类似于一个包含(x, y, value)的数组?如果没有,您能指导我正确的方向吗?