以下代码可以找到所有白色斑点的边界矩形(blob)。
备注:如果我们可以假设白色斑点确实是白色的(即在灰度图像中具有值255),则可以使用此代码片段。考虑将其放入某个类中,以避免向Traverse函数传递不必要的参数。尽管它可以工作。这个想法基于DFS。除了灰度图像外,我们还有一个ids矩阵,用于分配和记住哪个像素属于哪个blob(所有具有相同id的像素属于同一个blob)。
void Traverse(int xs, int ys, cv::Mat &ids,cv::Mat &image, int blobID, cv::Point &leftTop, cv::Point &rightBottom) {
std::stack<cv::Point> S;
S.push(cv::Point(xs,ys));
while (!S.empty()) {
cv::Point u = S.top();
S.pop();
int x = u.x;
int y = u.y;
if (image.at<unsigned char>(y,x) == 0 || ids.at<unsigned char>(y,x) > 0)
continue;
ids.at<unsigned char>(y,x) = blobID;
if (x < leftTop.x)
leftTop.x = x;
if (x > rightBottom.x)
rightBottom.x = x;
if (y < leftTop.y)
leftTop.y = y;
if (y > rightBottom.y)
rightBottom.y = y;
if (x > 0)
S.push(cv::Point(x-1,y));
if (x < ids.cols-1)
S.push(cv::Point(x+1,y));
if (y > 0)
S.push(cv::Point(x,y-1));
if (y < ids.rows-1)
S.push(cv::Point(x,y+1));
}
}
int FindBlobs(cv::Mat &image, std::vector<cv::Rect> &out, float minArea) {
cv::Mat ids = cv::Mat::zeros(image.rows, image.cols,CV_8UC1);
cv::Mat thresholded;
cv::cvtColor(image, thresholded, CV_RGB2GRAY);
const int thresholdLevel = 130;
cv::threshold(thresholded, thresholded, thresholdLevel, 255, CV_THRESH_BINARY);
int blobId = 1;
for (int x = 0;x<ids.cols;x++)
for (int y=0;y<ids.rows;y++){
if (thresholded.at<unsigned char>(y,x) > 0 && ids.at<unsigned char>(y,x) == 0) {
cv::Point leftTop(ids.cols-1, ids.rows-1), rightBottom(0,0);
Traverse(x,y,ids, thresholded,blobId++, leftTop, rightBottom);
cv::Rect r(leftTop, rightBottom);
if (r.area() > minArea)
out.push_back(r);
}
}
return blobId;
}
编辑: 我修复了一个错误,降低了阈值水平,现在输出如下。我认为这是一个很好的起点。

编辑2: 在
Traverse() 中,我消除了递归。在较大的图像中,递归会导致堆栈溢出。
 我想知道黑色圆圈中有多少个斑点以及每个斑点的大小(所有斑点都是白色)。
我想知道黑色圆圈中有多少个斑点以及每个斑点的大小(所有斑点都是白色)。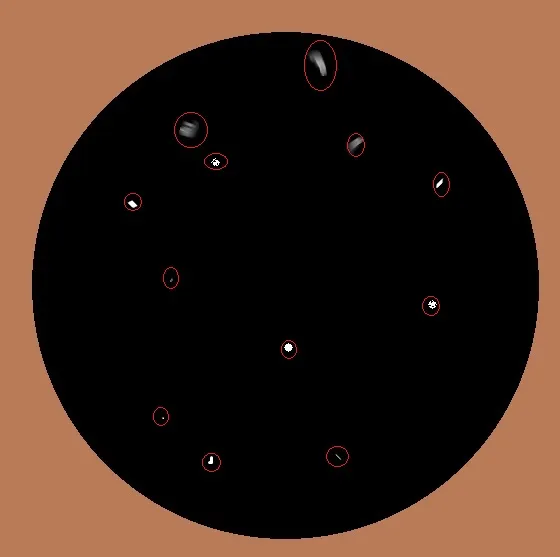 我知道如何找到白色像素,并且很容易从左边验证顺序:
我知道如何找到白色像素,并且很容易从左边验证顺序: