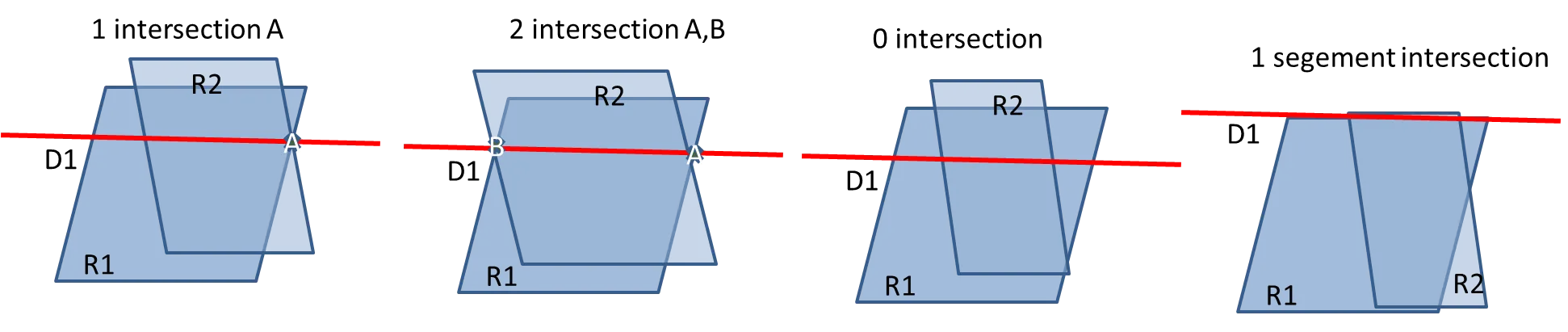
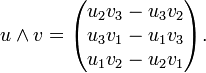
为了在三维空间中获取两个矩形的交线,我将它们转换成平面,并使用它们法向量的叉积来获取交线,然后尝试获取每个矩形线段与交线的交点。
问题是该线段与三条线段平行,并且只与一条线段在NAN、NAN、NAN处相交,这完全是错误的。您能告诉我代码哪里有问题吗?
我使用了此链接中的vector3,并创建了以下平面类:
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace referenceLineAlgorithm
{
struct Line
{
public Vector3 direction;
public Vector3 point;
}
struct lineSegment
{
public Vector3 firstPoint;
public Vector3 secondPoint;
}
class plane_test
{
public enum Line3DResult
{
Line3DResult_Parallel = 0,
Line3DResult_SkewNoCross = 1,
Line3DResult_SkewCross = 2
};
#region Fields
public Vector3 Normal;
public float D;
public Vector3[] cornersArray;
public Vector3 FirstPoint;
public Vector3 SecondPoint;
public Vector3 temp;
public Vector3 normalBeforeNormalization;
#endregion
#region constructors
public plane_test(Vector3 point0, Vector3 point1, Vector3 point2, Vector3 point3)
{
Vector3 edge1 = point1 - point0;
Vector3 edge2 = point2 - point0;
Normal = edge1.Cross(edge2);
normalBeforeNormalization = Normal;
Normal.Normalize();
D = -Normal.Dot(point0);
///// Set the Rectangle corners
cornersArray = new Vector3[] { point0, point1, point2, point3 };
}
#endregion
#region Methods
/// <summary>
/// This is a pseudodistance. The sign of the return value is
/// positive if the point is on the positive side of the plane,
/// negative if the point is on the negative side, and zero if the
/// point is on the plane.
/// The absolute value of the return value is the true distance only
/// when the plane normal is a unit length vector.
/// </summary>
/// <param name="point"></param>
/// <returns></returns>
public float GetDistance(Vector3 point)
{
return Normal.Dot(point) + D;
}
public void Intersection(plane_test SecondOne)
{
///////////////////////////// Get the parallel to the line of interrsection (Direction )
Vector3 LineDirection = Normal.Cross(SecondOne.Normal);
float d1 = this.GetDistance(LineDirection);
float d2 = SecondOne.GetDistance(LineDirection);
temp = (LineDirection - (this.Normal * d1) - (SecondOne.Normal * d2));
temp.x = Math.Abs((float)Math.Round((decimal)FirstPoint.x, 2));
temp.y = Math.Abs((float)Math.Round((decimal)FirstPoint.y, 2));
Line line;
line.direction = LineDirection;
line.point = temp;
////////// Line segments
lineSegment AB, BC, CD, DA;
AB.firstPoint = cornersArray[0]; AB.secondPoint = cornersArray[1];
BC.firstPoint = cornersArray[1]; BC.secondPoint = cornersArray[2];
CD.firstPoint = cornersArray[2]; CD.secondPoint = cornersArray[3];
DA.firstPoint = cornersArray[3]; DA.secondPoint = cornersArray[0];
Vector3 r1 = new Vector3(-1, -1, -1);
Vector3 r2 = new Vector3(-1, -1, -1);
Vector3 r3 = new Vector3(-1, -1, -1);
Vector3 r4 = new Vector3(-1, -1, -1);
/*
0,0 |----------------| w,0
| |
| |
0,h |________________| w,h
*/
IntersectionPointBetweenLines(AB, line, ref r1);
IntersectionPointBetweenLines(BC, line, ref r2);
IntersectionPointBetweenLines(CD, line, ref r3);
IntersectionPointBetweenLines(DA, line, ref r4);
List<Vector3> points = new List<Vector3>();
points.Add(r1);
points.Add(r2);
points.Add(r3);
points.Add(r4);
points.RemoveAll(
t => ((t.x == -1) && (t.y == -1) && (t.z == -1))
);
if (points.Count == 2)
{
FirstPoint = points[0];
SecondPoint = points[1];
}
}
public Line3DResult IntersectionPointBetweenLines(lineSegment first, Line aSecondLine, ref Vector3 result)
{
Vector3 p1 = first.firstPoint;
Vector3 n1 = first.secondPoint - first.firstPoint;
Vector3 p2 = aSecondLine.point;
Vector3 n2 = aSecondLine.direction;
bool parallel = AreLinesParallel(first, aSecondLine);
if (parallel)
{
return Line3DResult.Line3DResult_Parallel;
}
else
{
float d = 0, dt = 0, dk = 0;
float t = 0, k = 0;
if (Math.Abs(n1.x * n2.y - n2.x * n1.y) > float.Epsilon)
{
d = n1.x * (-n2.y) - (-n2.x) * n1.y;
dt = (p2.x - p1.x) * (-n2.y) - (p2.y - p1.y) * (-n2.x);
dk = n1.x * (p2.x - p1.x) - n1.y * (p2.y - p1.y);
}
else if (Math.Abs(n1.z * n2.y - n2.z * n1.y) > float.Epsilon)
{
d = n1.z * (-n2.y) - (-n2.z) * n1.y;
dt = (p2.z - p1.z) * (-n2.y) - (p2.y - p1.y) * (-n2.z);
dk = n1.z * (p2.z - p1.z) - n1.y * (p2.y - p1.y);
}
else if (Math.Abs(n1.x * n2.z - n2.x * n1.z) > float.Epsilon)
{
d = n1.x * (-n2.z) - (-n2.x) * n1.z;
dt = (p2.x - p1.x) * (-n2.z) - (p2.z - p1.z) * (-n2.x);
dk = n1.x * (p2.x - p1.x) - n1.z * (p2.z - p1.z);
}
t = dt / d;
k = dk / d;
result = n1 * t + p1;
// Check if the point on the segmaent or not
// if (! isPointOnSegment(first, result))
//{
// result = new Vector3(-1,-1,-1);
// }
return Line3DResult.Line3DResult_SkewCross;
}
}
private bool AreLinesParallel(lineSegment first, Line aSecondLine)
{
Vector3 vector = (first.secondPoint - first.firstPoint);
vector.Normalize();
float kl = 0, km = 0, kn = 0;
if (vector.x != aSecondLine.direction.x)
{
if (vector.x != 0 && aSecondLine.direction.x != 0)
{
kl = vector.x / aSecondLine.direction.x;
}
}
if (vector.y != aSecondLine.direction.y)
{
if (vector.y != 0 && aSecondLine.direction.y != 0)
{
km = vector.y / aSecondLine.direction.y;
}
}
if (vector.z != aSecondLine.direction.z)
{
if (vector.z != 0 && aSecondLine.direction.z != 0)
{
kn = vector.z / aSecondLine.direction.z;
}
}
// both if all are null or all are equal, the lines are parallel
return (kl == km && km == kn);
}
private bool isPointOnSegment(lineSegment segment, Vector3 point)
{
//(x - x1) / (x2 - x1) = (y - y1) / (y2 - y1) = (z - z1) / (z2 - z1)
float component1 = (point.x - segment.firstPoint.x) / (segment.secondPoint.x - segment.firstPoint.x);
float component2 = (point.y - segment.firstPoint.y) / (segment.secondPoint.y - segment.firstPoint.y);
float component3 = (point.z - segment.firstPoint.z) / (segment.secondPoint.z - segment.firstPoint.z);
if ((component1 == component2) && (component2 == component3))
{
return true;
}
else
{
return false;
}
}
#endregion
}
}
static void Main(string[] args)
{
//// create the first plane points
Vector3 point11 =new Vector3(-255.5f, -160.0f,-1.5f) ; //0,0
Vector3 point21 = new Vector3(256.5f, -160.0f, -1.5f); //0,w
Vector3 point31 = new Vector3(256.5f, -160.0f, -513.5f); //h,0
Vector3 point41 = new Vector3(-255.5f, -160.0f, -513.5f); //w,h
plane_test plane1 = new plane_test(point11, point21, point41, point31);
//// create the Second plane points
Vector3 point12 = new Vector3(-201.6289f, -349.6289f, -21.5f);
Vector3 point22 =new Vector3(310.3711f,-349.6289f,-21.5f);
Vector3 point32 = new Vector3(310.3711f, 162.3711f, -21.5f);
Vector3 point42 =new Vector3(-201.6289f,162.3711f,-21.5f);
plane_test plane2 = new plane_test(point12, point22, point42, point32);
plane2.Intersection(plane1);
}
这是测试值。 最好的问候。