我们一直在学习像Sobel和Roberts卷积矩阵这样的方法来检测图像中的边缘,并扩展到Canny方法以清除它们。但现在,我们正在学习“线”检测,而不是“边缘”检测-使用Hough变换等方法。
问题是-我甚至不知道如何概念化“线”和“边缘”之间的区别。有人能够在不使用复杂的数学方程等的情况下解释这种差异吗?
我们一直在学习像Sobel和Roberts卷积矩阵这样的方法来检测图像中的边缘,并扩展到Canny方法以清除它们。但现在,我们正在学习“线”检测,而不是“边缘”检测-使用Hough变换等方法。
问题是-我甚至不知道如何概念化“线”和“边缘”之间的区别。有人能够在不使用复杂的数学方程等的情况下解释这种差异吗?
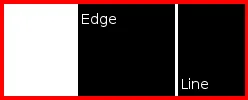 梯度幅值滤波器将边缘转换为线条。
梯度幅值滤波器将边缘转换为线条。Sobel和Roberts等方法可以帮助您在图像中检测边缘。Hough Transform等方法可以帮助识别这些边缘是否实际上是几何形状,如直线、圆和椭圆。