使用Python和
PuLP库,我们如何创建线性规划模型来解决旅行商问题(TSP)?
从维基百科得知,目标函数和约束条件为:
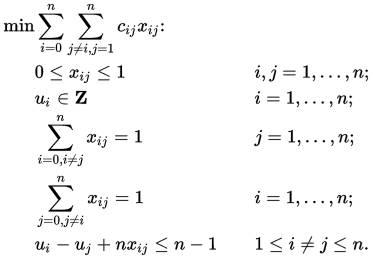
问题:这是我的部分尝试,我卡住了。
I did not include the final constraint in the code because I dont know how to define it. I believe this constraint with u variables are for preventing sub-cycles in the solution
Also, solving for the current model gives decision variables such as
x0_0andx1_1being equal to1.0which is definitely wrong... I can't figure out why this is so even though I hadif i == j: upperBound = 0
Python 代码
import pulp
def get_dist(tsp):
with open(tsp, 'rb') as tspfile:
r = csv.reader(tspfile, delimiter='\t')
d = [row for row in r]
d = d[1:] # skip header row
locs = set([r[0] for r in d]) | set([r[1] for r in d])
loc_map = {l:i for i, l in enumerate(locs)}
idx_map = {i:l for i, l in enumerate(locs)}
dist = [(loc_map[r[0]], loc_map[r[1]], r[2]) for r in d]
return dist, idx_map
def dist_from_coords(dist, n):
points = []
for i in range(n):
points.append([0] * n)
for i, j, v in dist:
points[i][j] = points[j][i] = float(v)
return points
def find_tour():
tsp_file = '/Users/test/' + 'my-waypoints-dist-dur.tsv'
coords, idx_map = get_dist(tsp_file)
n = len(idx_map)
dist = dist_from_coords(coords, n)
# Define the problem
m = pulp.LpProblem('TSP', pulp.LpMinimize)
# Create variables
# x[i,j] is 1 if edge i->j is on the optimal tour, and 0 otherwise
# Also forbid loops
x = {}
for i in range(n):
for j in range(n):
lowerBound = 0
upperBound = 1
# Forbid loops
if i == j:
upperBound = 0
# print i,i
x[i,j] = pulp.LpVariable('x' + str(i) + '_' + str(j), lowerBound, upperBound, pulp.LpBinary)
# x[j,i] = x[i,j]
# Define the objective function to minimize
m += pulp.lpSum([dist[i][j] * x[i,j] for i in range(n) for j in range(n)])
# Add degree-2 constraint
for i in range(n):
m += pulp.lpSum([x[i,j] for j in range(n)]) == 2
# Solve and display results
status = m.solve()
print pulp.LpStatus[status]
for i in range(n):
for j in range(n):
if pulp.value(x[i,j]) >0:
print str(i) + '_' + str(j) + ': ' + str( pulp.value(x[i,j]) )
find_tour()
my-waypoints-dist-dur.tsv
数据文件可以在这里找到。
结果
0_0: 1.0
0_5: 1.0
1_1: 1.0
1_15: 1.0
2_2: 1.0
2_39: 1.0
3_3: 1.0
3_26: 1.0
4_4: 1.0
4_42: 1.0
5_5: 1.0
5_33: 1.0
6_6: 1.0
6_31: 1.0
7_7: 1.0
7_38: 1.0
8_8: 1.0
8_24: 1.0
9_9: 1.0
9_26: 1.0
10_4: 1.0
10_10: 1.0
11_11: 1.0
11_12: 1.0
12_11: 1.0
12_12: 1.0
13_13: 1.0
13_17: 1.0
14_14: 1.0
14_18: 1.0
15_1: 1.0
15_15: 1.0
16_3: 1.0
16_16: 1.0
17_13: 1.0
17_17: 1.0
18_14: 1.0
18_18: 1.0
19_19: 1.0
19_20: 1.0
20_4: 1.0
20_20: 1.0
21_21: 1.0
21_25: 1.0
22_22: 1.0
22_27: 1.0
23_21: 1.0
23_23: 1.0
24_8: 1.0
24_24: 1.0
25_21: 1.0
25_25: 1.0
26_26: 1.0
26_43: 1.0
27_27: 1.0
27_38: 1.0
28_28: 1.0
28_47: 1.0
29_29: 1.0
29_31: 1.0
30_30: 1.0
30_34: 1.0
31_29: 1.0
31_31: 1.0
32_25: 1.0
32_32: 1.0
33_28: 1.0
33_33: 1.0
34_30: 1.0
34_34: 1.0
35_35: 1.0
35_42: 1.0
36_36: 1.0
36_47: 1.0
37_36: 1.0
37_37: 1.0
38_27: 1.0
38_38: 1.0
39_39: 1.0
39_44: 1.0
40_40: 1.0
40_43: 1.0
41_41: 1.0
41_45: 1.0
42_4: 1.0
42_42: 1.0
43_26: 1.0
43_43: 1.0
44_39: 1.0
44_44: 1.0
45_15: 1.0
45_45: 1.0
46_40: 1.0
46_46: 1.0
47_28: 1.0
47_47: 1.0
...
更新的代码
import csv
import pulp
def get_dist(tsp):
with open(tsp, 'rb') as tspfile:
r = csv.reader(tspfile, delimiter='\t')
d = [row for row in r]
d = d[1:] # skip header row
locs = set([r[0] for r in d]) | set([r[1] for r in d])
loc_map = {l:i for i, l in enumerate(locs)}
idx_map = {i:l for i, l in enumerate(locs)}
dist = [(loc_map[r[0]], loc_map[r[1]], r[2]) for r in d]
return dist, idx_map
def dist_from_coords(dist, n):
points = []
for i in range(n):
points.append([0] * n)
for i, j, v in dist:
points[i][j] = points[j][i] = float(v)
return points
def find_tour():
tsp_file = '/Users/test/' + 'my-waypoints-dist-dur.tsv'
coords, idx_map = get_dist(tsp_file)
n = len(idx_map)
dist = dist_from_coords(coords, n)
# Define the problem
m = pulp.LpProblem('TSP', pulp.LpMinimize)
# Create variables
# x[i,j] is 1 if edge i->j is on the optimal tour, and 0 otherwise
# Also forbid loops
x = {}
for i in range(n+1):
for j in range(n+1):
lowerBound = 0
upperBound = 1
# Forbid loops
if i == j:
upperBound = 0
# print i,i
# Create the decision variable and First constraint
x[i,j] = pulp.LpVariable('x' + str(i) + '_' + str(j), lowerBound, upperBound, pulp.LpBinary)
# x[j,i] = x[i,j]
# Define the objective function to minimize
m += pulp.lpSum([dist[i][j] * x[i,j] for i in range(1,n+1) for j in range(1,n+1)])
# Add degree-2 constraint (3rd and 4th)
for i in range(1,n+1):
m += pulp.lpSum([x[i,j] for j in range(1,n+1)]) == 2
# Add the last (5th) constraint (prevents subtours)
u = []
for i in range(1, n+1):
u.append(pulp.LpVariable('u_' + str(i), cat='Integer'))
for i in range(1, n-1):
for j in range(i+1, n+1):
m += pulp.lpSum([ u[i] - u[j] + n*x[i,j]]) <= n-1
# status = m.solve()
# print pulp.LpStatus[status]
# for i in range(n):
# for j in range(n):
# if pulp.value(x[i,j]) >0:
# print str(i) + '_' + str(j) + ': ' + str( pulp.value(x[i,j]) )
find_tour()
x1_1等于1.0,这显然是错误的...我无法弄清楚为什么会这样。 - Nyxynyx