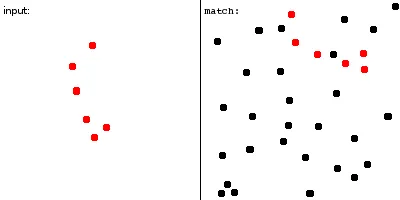
我正在尝试寻找适用于在较大数据集中搜索2D点子集的算法。 一张图片胜过千言万语:
似乎最相关的问题是点集配准[1]。我正在尝试使用CPD和其他刚性和非刚性算法的实现,但它们似乎在查找较大点集中的小子集方面表现不佳。
另一种方法可能是使用星跟踪算法,如[2]中提到的“角度方法”,或者像[3]这样更健壮的方法。但是,它们似乎都是针对大型输入集和目标集而设计的。我正在寻找更少可靠但更简约的东西...
感谢任何想法!
[1]: http://en.wikipedia.org/wiki/Point_set_registration [2]: http://www.acsu.buffalo.edu/~johnc/star_gnc04.pdf [3]: http://arxiv.org/abs/0910.2233