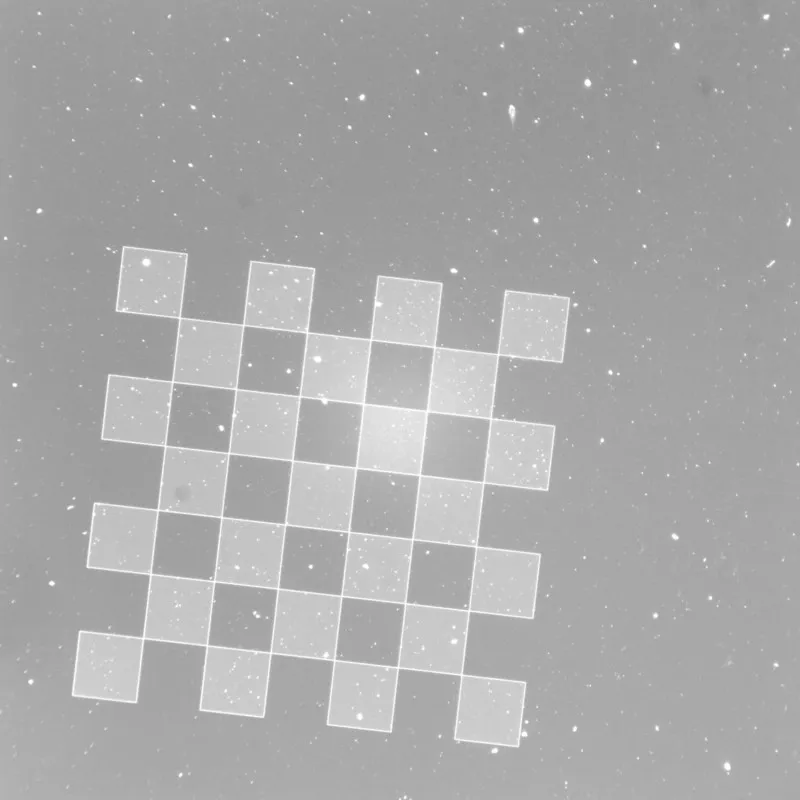
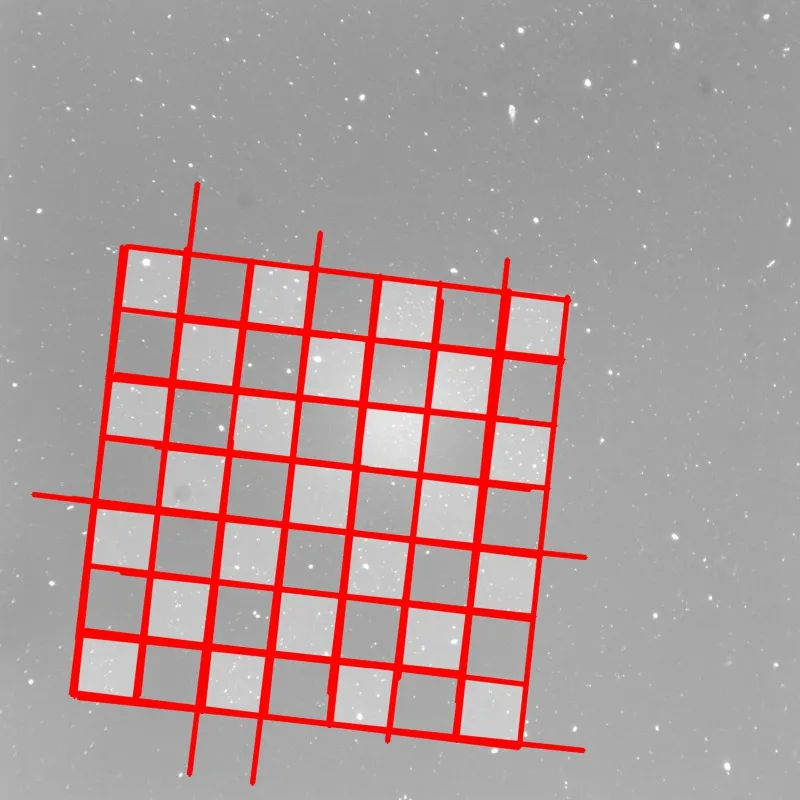
我正在尝试获取校准棋盘的阈值。由于观察到微型棋盘存在一些灰尘,无法直接检测棋盘角落。我尝试了几种方法,HoughLinesP似乎是最简单的方法。但结果不太好,如何改善我的结果?
import numpy as np
import cv2
img = cv2.imread('lines.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
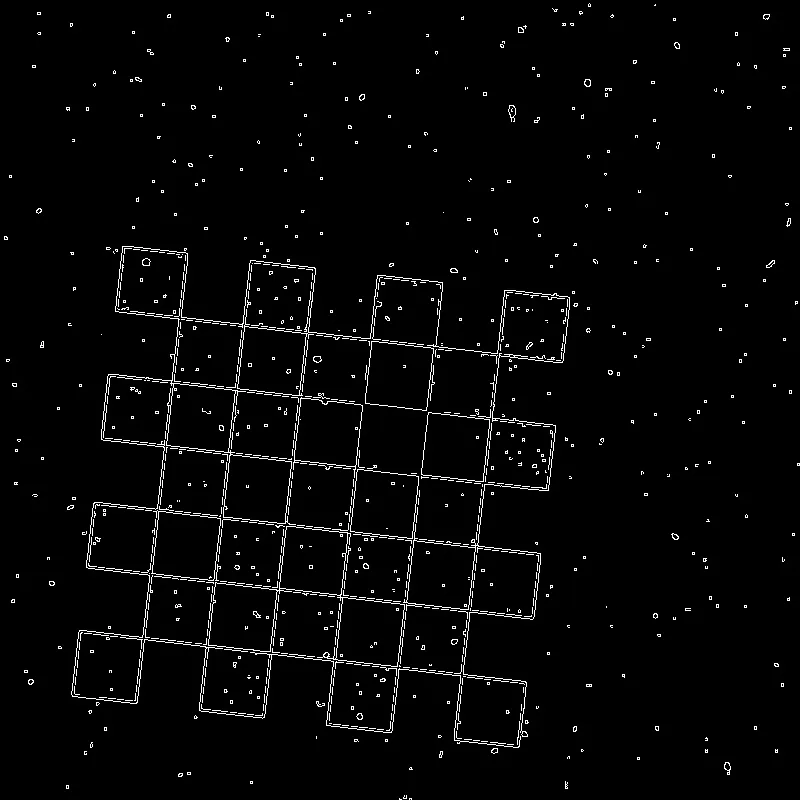
edges = cv2.Canny(gray,50,150,apertureSize = 3)
print img.shape[1]
print img.shape
minLineLength=100
lines = cv2.HoughLinesP(image=edges,rho=0.02,theta=np.pi/500, threshold=10,lines=np.array([]), minLineLength=minLineLength,maxLineGap=100)
a,b,c = lines.shape
for i in range(a):
cv2.line(img, (lines[i][0][0], lines[i][0][1]), (lines[i][0][2], lines[i][0][3]), (0, 0, 255), 3, cv2.LINE_AA)
cv2.imwrite('houghlines5.jpg',img)
如下图所示,我无法获得我的棋盘,线条在很多方向上被绘制...(原始图片:https://s22.postimg.org/iq2b91xq9/droite_Image_00000.jpg)
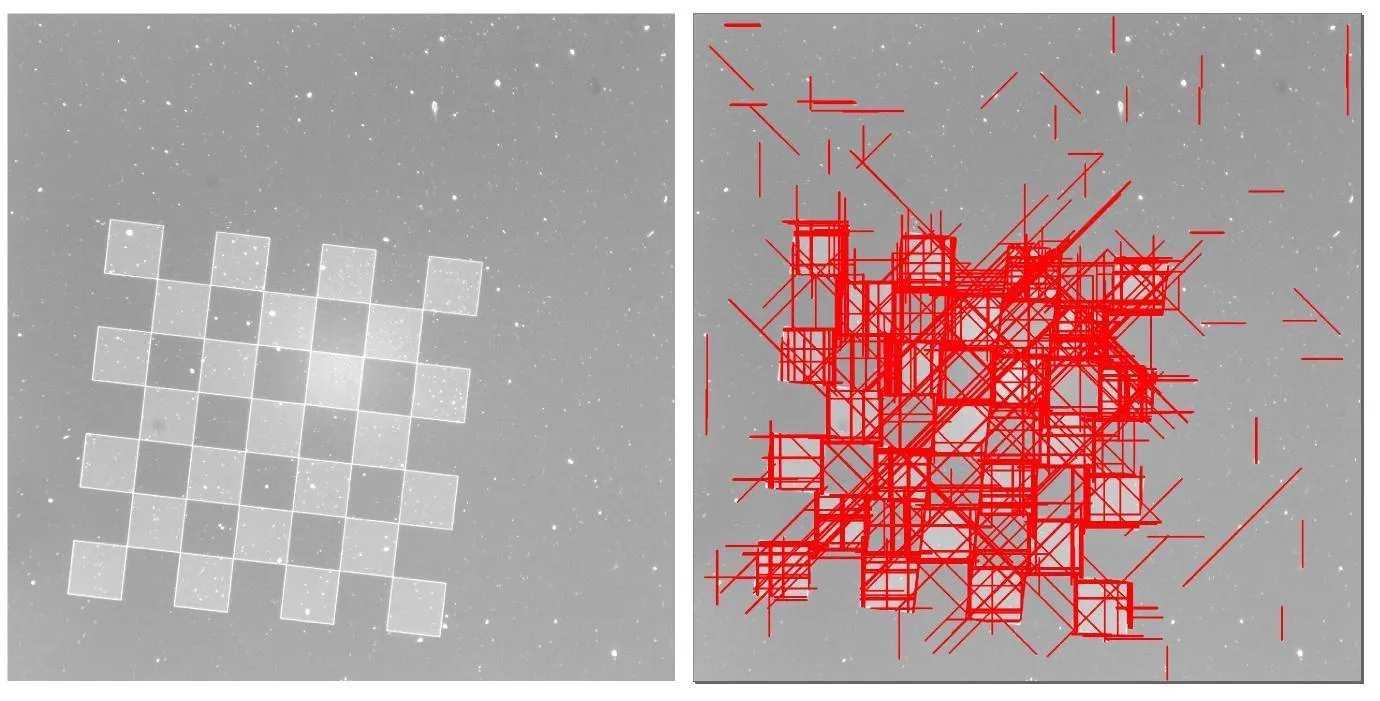
{kind=link}