我该如何创建一个处理旋转的无限/重复世界,就像这个游戏一样:http://bloodfromastone.co.uk/retaliation.html。我通过以下层次结构编写了旋转移动的世界:
Scene
- mainLayer (CCLayer)
- rotationLayer (CCNode)
- positionLayer (CCNode)
rotationLayer和positionLayer现在具有相同的大小(4000x4000 px)。我通过旋转rotationLayer来旋转整个世界,并通过移动positionLayer来移动整个世界,使得玩家始终位于设备屏幕的中心,并且是世界在移动和旋转。
现在我想要实现的是,如果玩家到达世界的边界(将世界移动以使世界边界与设备屏幕边界接触),则将世界“包裹”到相反的边界,以使世界无限延伸。如果世界没有旋转,那么这很容易,但是由于它旋转了,我不知道该如何做到这一点。我对数学一窍不通,在思考数学问题时需要帮助。
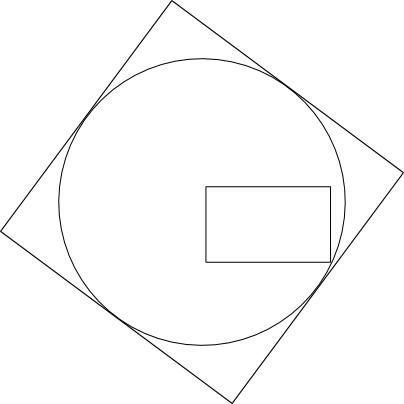
我认为我需要计算一个圆的半径,作为我的正方形世界内部的铸造厂,无论正方形世界处于什么角度,都将确保可见矩形(屏幕)始终位于世界正方形的边界内。然后,我需要计算可见矩形边界是否超出了边界圆,并且如果是,我需要计算在边界圆中移动世界所需的新的相反位置。为了说明问题,我添加了5个图像。
现在我想要实现的是,如果玩家到达世界的边界(将世界移动以使世界边界与设备屏幕边界接触),则将世界“包裹”到相反的边界,以使世界无限延伸。如果世界没有旋转,那么这很容易,但是由于它旋转了,我不知道该如何做到这一点。我对数学一窍不通,在思考数学问题时需要帮助。
我认为我需要计算一个圆的半径,作为我的正方形世界内部的铸造厂,无论正方形世界处于什么角度,都将确保可见矩形(屏幕)始终位于世界正方形的边界内。然后,我需要计算可见矩形边界是否超出了边界圆,并且如果是,我需要计算在边界圆中移动世界所需的新的相反位置。为了说明问题,我添加了5个图像。
旋转的正方形世界再次移动到垂直位置相反的位置,以便可见矩形的底部现在击中旋转世界内缘的圆圈:
在非旋转情况下移动positionLayer是我能够解决的数学问题,当世界/CCNode(positionLayer)被移动/定位时,它位于一个被旋转的世界/CCNode(rotationLayer)内,该世界/CCNode(rotationLayer)会发生旋转。旋转的anchor point始终在屏幕中心,但由于被移动的positionLayer位于旋转的rotationLayer内部,因此它会围绕rotationLayer的anchor point旋转。然后我就迷茫了...例如,当我将positionLayer下移足够多,使其顶边撞到屏幕顶部时,我需要像JohnPS所描述的那样对该positionLayer进行包装,但这并不简单,我需要根据rotationLayer CCNode的旋转情况将其包装成一个向量。我不知道如何做。
谢谢
Søren
 .
.{kind=link}