我有一个机械振动系统,由一个 n x n 矩阵和传递函数 tf( ... ) 定义。
W = minreal( [ tf( ... ) ... tf(...) ; ... ; tf( ... ) ... tf(...) ];
在下面的图中,您可以看到一些选定的频率响应。它显示了高频不规则性。
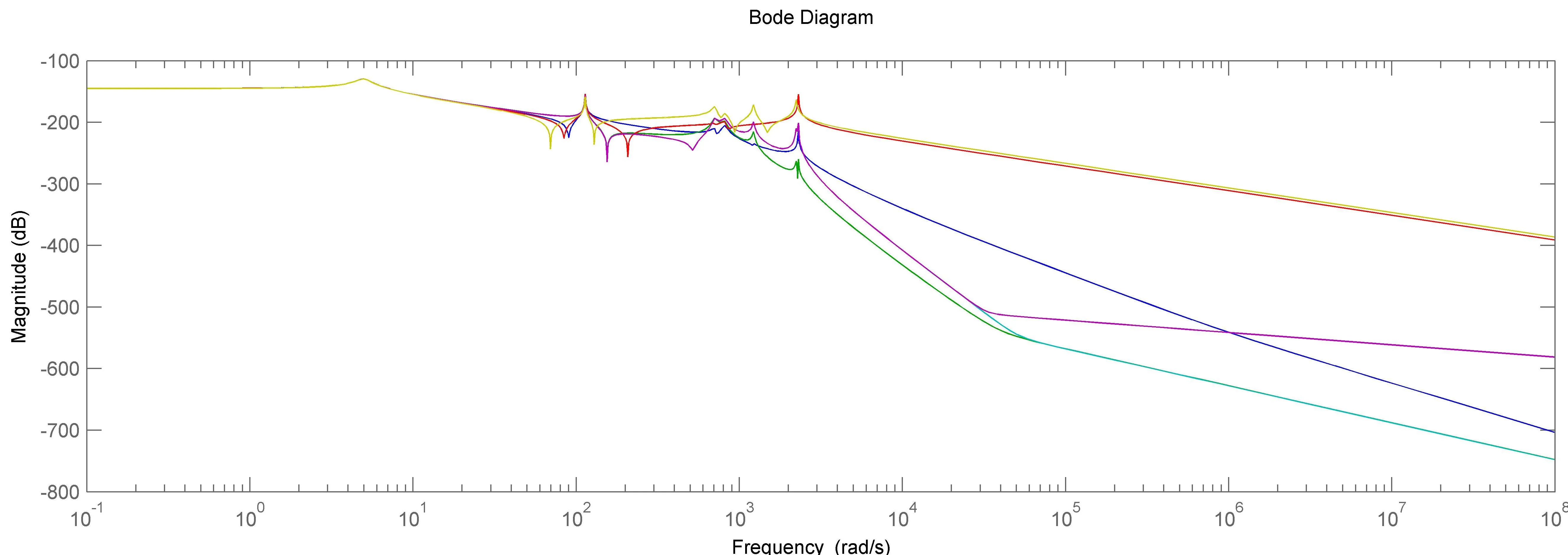 当我将这个系统与其他高阶系统结合在Simulink中时,所需的步长必须非常低,否则我的系统就不稳定。然后模拟时间非常长,这使得验证我的模型的一般功能变得不可能。
当我将这个系统与其他高阶系统结合在Simulink中时,所需的步长必须非常低,否则我的系统就不稳定。然后模拟时间非常长,这使得验证我的模型的一般功能变得不可能。因此,我想在我的传输矩阵上应用低通滤波器,以便我可以使用更大的步骤进行更快的模拟时间。是否有一种方法可以在我的matlab代码或Simulink中实现这一点?
最后,我想根据我拥有多少时间和需要的精度来调整阈值频率。
我已经对适当的求解器进行了一些研究,但没有成功。任何关于求解器的建议也将帮助我。
这是我可用的工具箱的简陋列表。
Control System Toolbox Version 9.3 (R2012a)
Simulink Control Design Version 3.5 (R2012a)
System Identification Toolbox Version 8.0 (R2012a)
提前感谢您!
编辑:使用@am304的建议来说明。
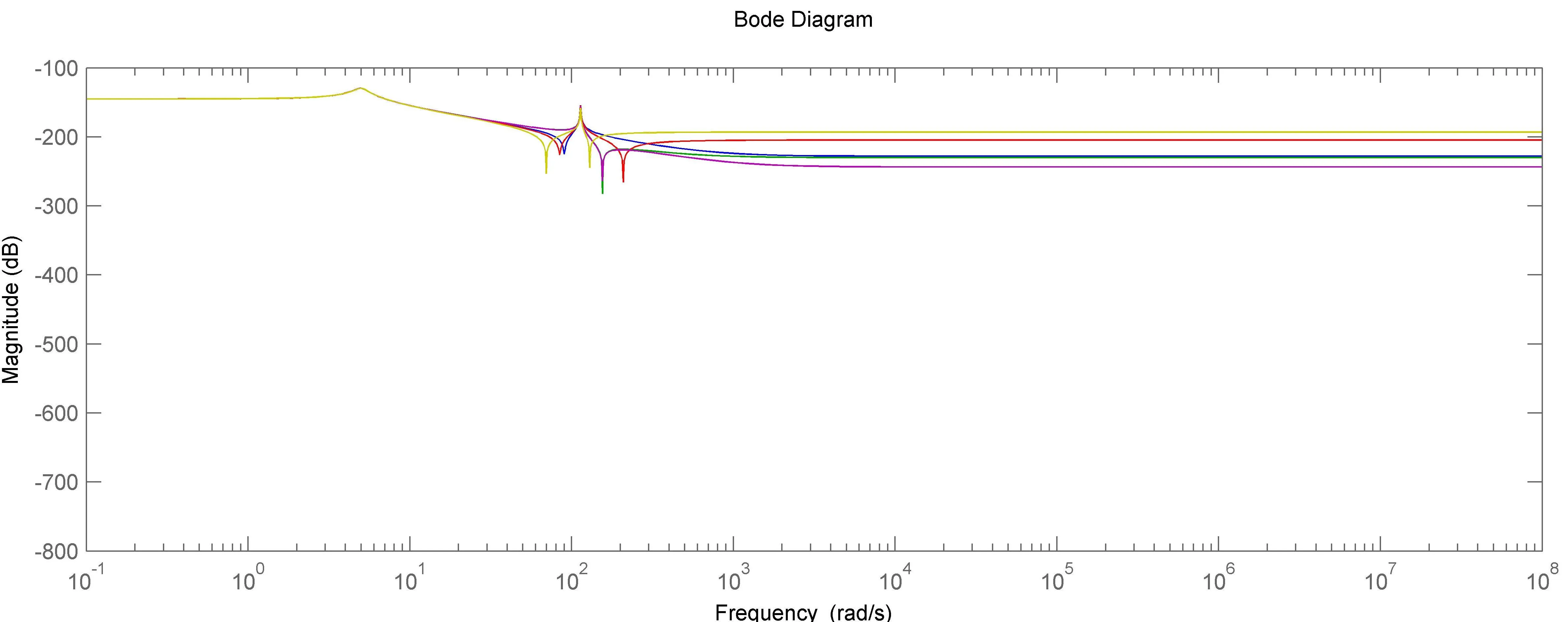
从18阶到4阶降低系统的伯德图,我的情况不需要低通滤波器了。
ode15s或ode23t定义的公差对于一个稳定的系统来说太严格了,以至于减少模拟时间的效果不明显。此外,该模型必须与耦合的有限元分析交互,后者使用固定步长。因此,我尝试避免使用可变步长,但在最坏的情况下,我可以通过编辑接口来解决这个问题。 - Robert Seifertn很大,则肯定更易读)。此外,也许可以尝试降低系统的阶数(n)(有关更多详细信息,请参见http://www.mathworks.co.uk/help/control/model-simplification-1.html)。 - am304balred导致速度提升了35%,使用balred和balreal(转换为状态空间)的组合最终使我加速了83%。非常感谢! - Robert Seifert