你可以使用partition来实现此功能:
partition将一个元素集合分割成等价类。您可以将等价类定义为给定欧几里得距离(半径公差)内的所有点。
如果你使用C++11,你可以简单地使用lambda函数:
int th_distance = 18; // radius tolerance
int th2 = th_distance * th_distance; // squared radius tolerance
vector<int> labels;
int n_labels = partition(pts, labels, [th2](const Point& lhs, const Point& rhs) {
return ((lhs.x - rhs.x)*(lhs.x - rhs.x) + (lhs.y - rhs.y)*(lhs.y - rhs.y)) < th2;
});
否则,您可以构建一个函数对象(在下面的代码中有详细说明)。
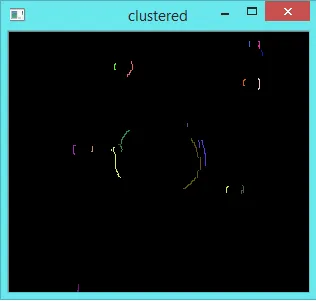
使用适当的半径距离(我发现18对这张图效果不错),我得到了:
完整代码:
#include <opencv2\opencv.hpp>
#include <vector>
#include <algorithm>
using namespace std;
using namespace cv;
struct EuclideanDistanceFunctor
{
int _dist2;
EuclideanDistanceFunctor(int dist) : _dist2(dist*dist) {}
bool operator()(const Point& lhs, const Point& rhs) const
{
return ((lhs.x - rhs.x)*(lhs.x - rhs.x) + (lhs.y - rhs.y)*(lhs.y - rhs.y)) < _dist2;
}
};
int main()
{
Mat1b img = imread("path_to_image", IMREAD_GRAYSCALE);
vector<Point> pts;
findNonZero(img, pts);
int th_distance = 18;
vector<int> labels;
int th2 = th_distance * th_distance;
int n_labels = partition(pts, labels, [th2](const Point& lhs, const Point& rhs) {
return ((lhs.x - rhs.x)*(lhs.x - rhs.x) + (lhs.y - rhs.y)*(lhs.y - rhs.y)) < th2;
});
vector<vector<Point>> contours(n_labels);
for (int i = 0; i < pts.size(); ++i)
{
contours[labels[i]].push_back(pts[i]);
}
vector<Vec3b> colors;
for (int i = 0; i < n_labels; ++i)
{
colors.push_back(Vec3b(rand() & 255, rand() & 255, rand() & 255));
}
Mat3b lbl(img.rows, img.cols, Vec3b(0, 0, 0));
for (int i = 0; i < pts.size(); ++i)
{
lbl(pts[i]) = colors[labels[i]];
}
imshow("Labels", lbl);
waitKey();
return 0;
}