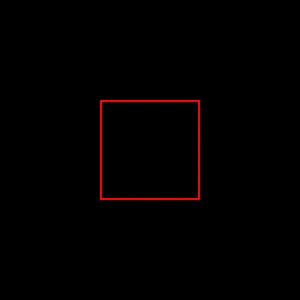
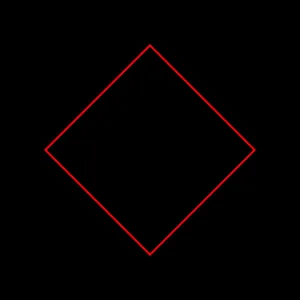
我正在尝试使用LogPolar变换从两个图像中获取比例和旋转角度。下面是两个300x300的样本图像。第一个矩形是100x100,第二个矩形是150x150,旋转了45度。
算法:
- 将两个图像都转换为LogPolar形式。
- 使用相位相关法找到平移位移。
- 将平移位移转换为比例和旋转角度(如何实现?)。
我的代码:
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/imgproc/imgproc_c.h>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
int main()
{
cv::Mat a = cv::imread("rect1.png", 0);
cv::Mat b = cv::imread("rect2.png", 0);
if (a.empty() || b.empty())
return -1;
cv::imshow("a", a);
cv::imshow("b", b);
cv::Mat pa = cv::Mat::zeros(a.size(), CV_8UC1);
cv::Mat pb = cv::Mat::zeros(b.size(), CV_8UC1);
IplImage ipl_a = a, ipl_pa = pa;
IplImage ipl_b = b, ipl_pb = pb;
cvLogPolar(&ipl_a, &ipl_pa, cvPoint2D32f(a.cols >> 1, a.rows >> 1), 40);
cvLogPolar(&ipl_b, &ipl_pb, cvPoint2D32f(b.cols >> 1, b.rows >> 1), 40);
cv::imshow("logpolar a", pa);
cv::imshow("logpolar b", pb);
cv::Mat pa_64f, pb_64f;
pa.convertTo(pa_64f, CV_64F);
pb.convertTo(pb_64f, CV_64F);
cv::Point2d pt = cv::phaseCorrelate(pa_64f, pb_64f);
std::cout << "Shift = " << pt
<< "Rotation = " << cv::format("%.2f", pt.y*180/(a.cols >> 1))
<< std::endl;
cv::waitKey(0);
return 0;
}
对数极坐标图像:
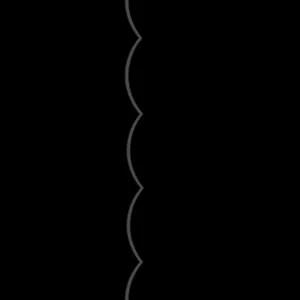
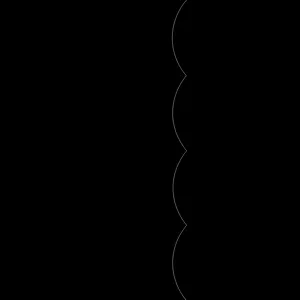
对于上述示例图像,平移量为(16.2986, 36.9105)。我已经成功地获取了旋转角度,即 44.29。但我在计算比例时遇到了困难。如何将给定的平移量转换为比例?