我正在使用一种分段接近方法,它将输出两个长度段之间的最短距离。每个段对应一个球体对象的起点和终点。速度是从一个点到另一个点的简单移动。
即使没有真正的碰撞,最接近的方法也可以成功。因此,我目前使用了一个10步方法,并计算在两个段上移动的2个球体之间的距离。因此,每个段的长度都是物理步骤中对象的遍历,半径是对象的半径。通过步进,我可以知道它们何时相撞,以及它们是否相撞(在大多数情况下)。
我感觉可能有更好的方法。虽然我认为第一个最接近的调用是必需的,但我认为紧随其后的方法有些弱。有人能帮帮我吗?如果需要,我可以说明这一点。
即使没有真正的碰撞,最接近的方法也可以成功。因此,我目前使用了一个10步方法,并计算在两个段上移动的2个球体之间的距离。因此,每个段的长度都是物理步骤中对象的遍历,半径是对象的半径。通过步进,我可以知道它们何时相撞,以及它们是否相撞(在大多数情况下)。
我感觉可能有更好的方法。虽然我认为第一个最接近的调用是必需的,但我认为紧随其后的方法有些弱。有人能帮帮我吗?如果需要,我可以说明这一点。
非常感谢!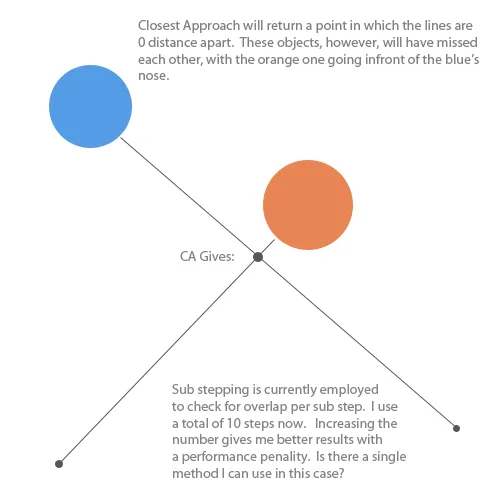
(来源:yfrog.com)
{kind=link}