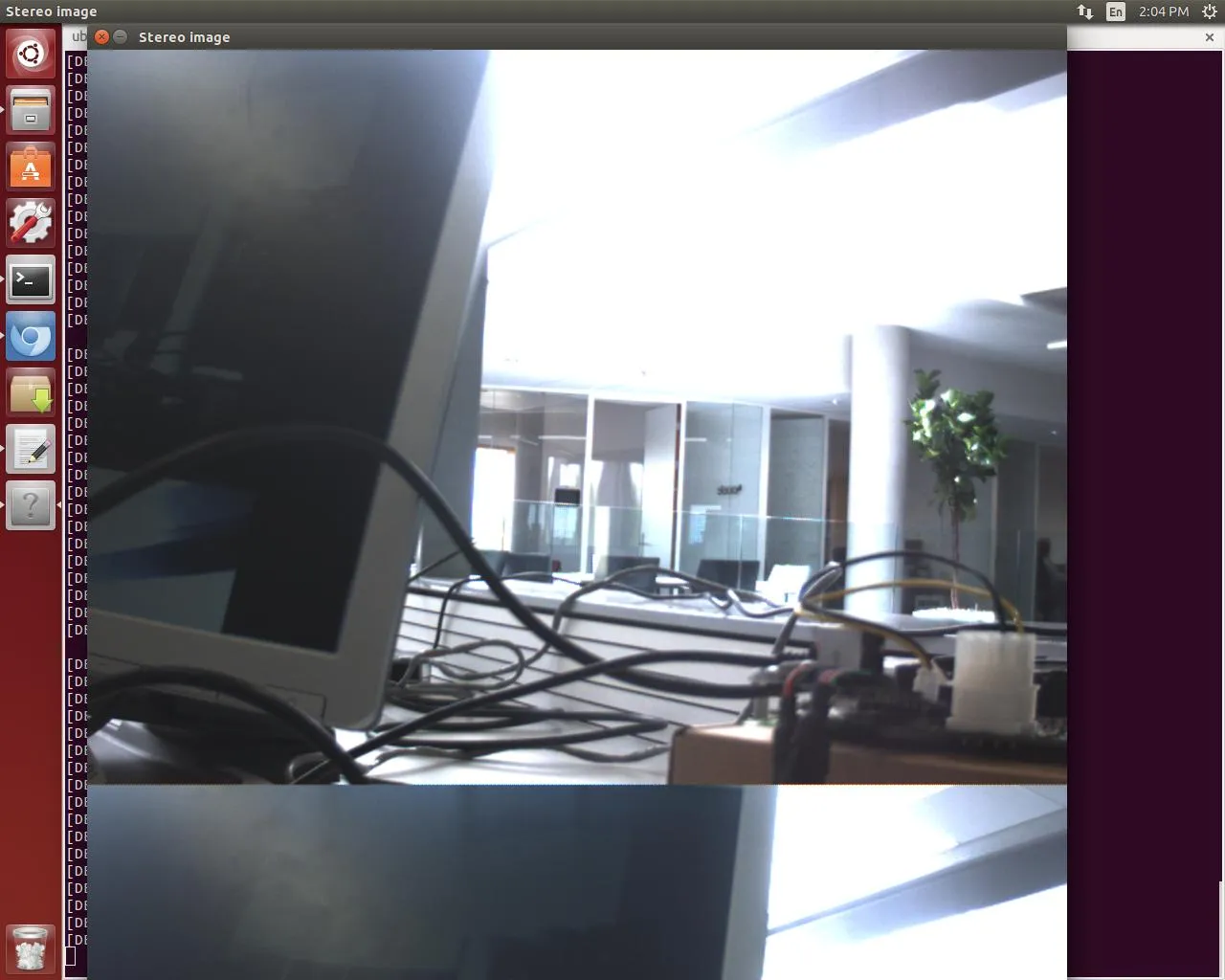
我打算制作一个程序,可以从Point Grey Bumblebee2 firewire 1394相机中捕获立体图像。这里有一个简单的例子,可以从libdc1394中获取彩色图像。
#include <stdio.h>
#include <stdint.h>
#include <dc1394/dc1394.h>
#include <stdlib.h>
#include <inttypes.h>
#define IMAGE_FILE_NAME "ImageRGB.ppm"
/*-----------------------------------------------------------------------
* Prints the type of format to standard out
*-----------------------------------------------------------------------*/
void print_format( uint32_t format )
{
#define print_case(A) case A: printf(#A ""); break;
switch( format ) {
print_case(DC1394_VIDEO_MODE_160x120_YUV444);
print_case(DC1394_VIDEO_MODE_320x240_YUV422);
print_case(DC1394_VIDEO_MODE_640x480_YUV411);
print_case(DC1394_VIDEO_MODE_640x480_YUV422);
print_case(DC1394_VIDEO_MODE_640x480_RGB8);
print_case(DC1394_VIDEO_MODE_640x480_MONO8);
print_case(DC1394_VIDEO_MODE_640x480_MONO16);
print_case(DC1394_VIDEO_MODE_800x600_YUV422);
print_case(DC1394_VIDEO_MODE_800x600_RGB8);
print_case(DC1394_VIDEO_MODE_800x600_MONO8);
print_case(DC1394_VIDEO_MODE_1024x768_YUV422);
print_case(DC1394_VIDEO_MODE_1024x768_RGB8);
print_case(DC1394_VIDEO_MODE_1024x768_MONO8);
print_case(DC1394_VIDEO_MODE_800x600_MONO16);
print_case(DC1394_VIDEO_MODE_1024x768_MONO16);
print_case(DC1394_VIDEO_MODE_1280x960_YUV422);
print_case(DC1394_VIDEO_MODE_1280x960_RGB8);
print_case(DC1394_VIDEO_MODE_1280x960_MONO8);
print_case(DC1394_VIDEO_MODE_1600x1200_YUV422);
print_case(DC1394_VIDEO_MODE_1600x1200_RGB8);
print_case(DC1394_VIDEO_MODE_1600x1200_MONO8);
print_case(DC1394_VIDEO_MODE_1280x960_MONO16);
print_case(DC1394_VIDEO_MODE_1600x1200_MONO16);
default:
dc1394_log_error("Unknown format\n");
exit(1);
}
}
/*-----------------------------------------------------------------------
* Returns the number of pixels in the image based upon the format
*-----------------------------------------------------------------------*/
uint32_t get_num_pixels(dc1394camera_t *camera, uint32_t format ) {
uint32_t w,h;
dc1394_get_image_size_from_video_mode(camera, format,&w,&h);
return w*h;
}
/*-----------------------------------------------------------------------
* Prints the type of color encoding
*-----------------------------------------------------------------------*/
void print_color_coding( uint32_t color_id )
{
switch( color_id ) {
case DC1394_COLOR_CODING_MONO8:
printf("MONO8");
break;
case DC1394_COLOR_CODING_YUV411:
printf("YUV411");
break;
case DC1394_COLOR_CODING_YUV422:
printf("YUV422");
break;
case DC1394_COLOR_CODING_YUV444:
printf("YUV444");
break;
case DC1394_COLOR_CODING_RGB8:
printf("RGB8");
break;
case DC1394_COLOR_CODING_MONO16:
printf("MONO16");
break;
case DC1394_COLOR_CODING_RGB16:
printf("RGB16");
break;
case DC1394_COLOR_CODING_MONO16S:
printf("MONO16S");
break;
case DC1394_COLOR_CODING_RGB16S:
printf("RGB16S");
break;
case DC1394_COLOR_CODING_RAW8:
printf("RAW8");
break;
case DC1394_COLOR_CODING_RAW16:
printf("RAW16");
break;
default:
dc1394_log_error("Unknown color coding = %d\n",color_id);
exit(1);
}
}
/*-----------------------------------------------------------------------
* Prints various information about the mode the camera is in
*-----------------------------------------------------------------------*/
void print_mode_info( dc1394camera_t *camera , uint32_t mode )
{
int j;
printf("Mode: ");
print_format(mode);
printf("\n");
dc1394framerates_t framerates;
dc1394error_t err;
err=dc1394_video_get_supported_framerates(camera,mode,&framerates);
DC1394_ERR(err,"Could not get frame rates");
printf("Frame Rates:\n");
for( j = 0; j < framerates.num; j++ ) {
uint32_t rate = framerates.framerates[j];
float f_rate;
dc1394_framerate_as_float(rate,&f_rate);
printf(" [%d] rate = %f\n",j,f_rate );
}
}
/*-----------------------------------------------------------------------
* Releases the cameras and exits
*-----------------------------------------------------------------------*/
void cleanup_and_exit(dc1394camera_t *camera)
{
dc1394_video_set_transmission(camera, DC1394_OFF);
dc1394_capture_stop(camera);
dc1394_camera_free(camera);
exit(1);
}
int main(int argc, char *argv[])
{
FILE* imagefile;
dc1394camera_t *camera;
unsigned int width, height;
dc1394video_frame_t *frame=NULL;
dc1394_t * d;
dc1394camera_list_t * list;
dc1394error_t err;
d = dc1394_new ();
err=dc1394_camera_enumerate (d, &list);
DC1394_ERR_RTN(err,"Failed to enumerate cameras");
if (list->num == 0) {
dc1394_log_error("No cameras found");
return 1;
}
camera = dc1394_camera_new (d, list->ids[0].guid);
if (!camera) {
dc1394_log_error("Failed to initialize camera with guid %llx", list->ids[0].guid);
return 1;
}
dc1394_camera_free_list (list);
printf("Using camera with GUID %"PRIx64"\n", camera->guid);
dc1394video_modes_t modes;
/*-----------------------------------------------------------------------
* list Capture Modes
*-----------------------------------------------------------------------*/
err=dc1394_video_get_supported_modes(camera, &modes);
DC1394_ERR_RTN(err,"Could not get list of modes");
uint32_t selected_mode = modes.modes[modes.num-1];
/*-----------------------------------------------------------------------
* setup capture
*-----------------------------------------------------------------------*/
err=dc1394_video_set_iso_speed(camera, DC1394_ISO_SPEED_400);
DC1394_ERR_CLN_RTN(err,cleanup_and_exit(camera),"Could not set iso speed");
err=dc1394_video_set_mode(camera, selected_mode);
DC1394_ERR_CLN_RTN(err,cleanup_and_exit(camera),"Could not set video mode\n");
err=dc1394_video_set_framerate(camera, DC1394_FRAMERATE_7_5);
DC1394_ERR_CLN_RTN(err,cleanup_and_exit(camera),"Could not set framerate\n");
err=dc1394_capture_setup(camera,4, DC1394_CAPTURE_FLAGS_DEFAULT);
DC1394_ERR_CLN_RTN(err,cleanup_and_exit(camera),"Could not setup camera-\nmake sure that the video mode and framerate are\nsupported by your camera\n");
/*-----------------------------------------------------------------------
* have the camera start sending us data
*-----------------------------------------------------------------------*/
err=dc1394_video_set_transmission(camera, DC1394_ON);
DC1394_ERR_CLN_RTN(err,cleanup_and_exit(camera),"Could not start camera iso transmission\n");
/*-----------------------------------------------------------------------
* capture one frame
*-----------------------------------------------------------------------*/
err=dc1394_capture_dequeue(camera, DC1394_CAPTURE_POLICY_WAIT, &frame);
DC1394_ERR_CLN_RTN(err,cleanup_and_exit(camera),"Could not capture a frame\n");
/*-----------------------------------------------------------------------
* stop data transmission
*-----------------------------------------------------------------------*/
err=dc1394_video_set_transmission(camera,DC1394_OFF);
DC1394_ERR_CLN_RTN(err,cleanup_and_exit(camera),"Could not stop the camera?\n");
/*-----------------------------------------------------------------------
* convert the image from what ever format it is to its RGB8
*-----------------------------------------------------------------------*/
dc1394_get_image_size_from_video_mode(camera, selected_mode, &width, &height);
uint64_t numPixels = height*width;
dc1394video_frame_t *new_frame=calloc(1,sizeof(dc1394video_frame_t));
new_frame->color_coding=DC1394_COLOR_CODING_RGB8;
dc1394_convert_frames(frame, new_frame);
/*-----------------------------------------------------------------------
* save image as 'Image.pgm'
*-----------------------------------------------------------------------*/
imagefile=fopen(IMAGE_FILE_NAME, "wb");
if( imagefile == NULL) {
perror( "Can't create '" IMAGE_FILE_NAME "'");
cleanup_and_exit(camera);
}
fprintf(imagefile,"P6\n%u %u\n255\n", width, height);
fwrite((const char *)new_frame->image, 1,numPixels*3, imagefile);
fclose(imagefile);
printf("wrote: " IMAGE_FILE_NAME "\n");
/*-----------------------------------------------------------------------
* close camera
*-----------------------------------------------------------------------*/
free(new_frame->image);
free(new_frame);
dc1394_video_set_transmission(camera, DC1394_OFF);
dc1394_capture_stop(camera);
dc1394_camera_free(camera);
dc1394_free (d);
return 0;
}
有人能帮我把这段代码转换成同时抓取立体图像的吗?我已经查看了coriander源代码,并花费了两天时间使用该源代码使其适用于立体图像。非常感激。