尽管我认为这可以通过精心放置的二进制阈值来解决(如另一个答案中所述),但添加一个基本形态学级别应该使其更能适应明显更脏的图像。(抱歉,它是用C++编写的)
我使用了任意的二进制阈值来演示概念,但建议使用基于统计的阈值(如大津方法)(如果可用)。
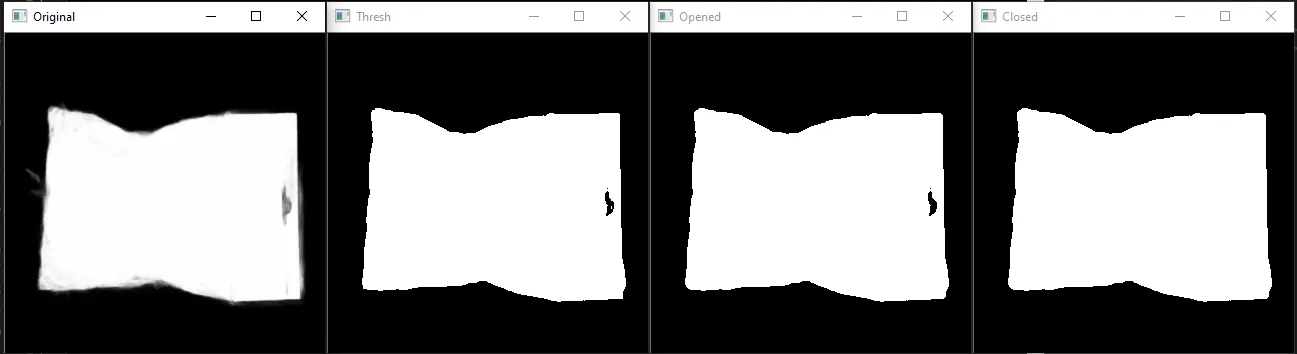
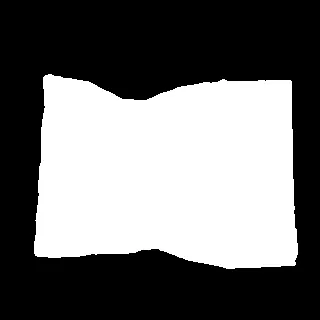
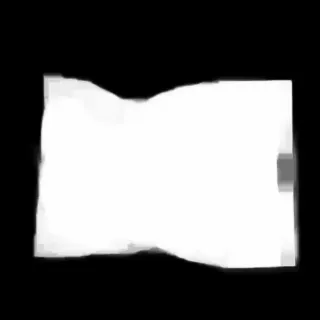
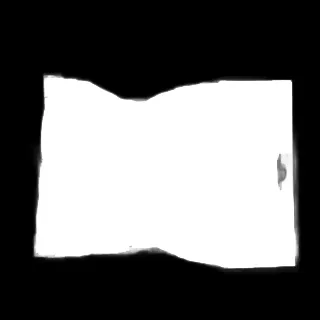
为了解释代码:阈值将灰度图像转换为二进制。开运算去除阈值操作留下的外部噪声(任何小条、碎片或像素噪声)。闭运算填充任何内部孔。"开运算"和"闭运算"只是特定顺序的膨胀和腐蚀组合的名称,以实现所需效果,而不改变底层对象的大小/形状。
#include <stdio.h>
#include <opencv2/opencv.hpp>
#include <Windows.h>
#include <string>
using namespace cv;
int main(int argc, char** argv)
{
std::string fileName = "C:/Local Software/voyDICOM/resources/images/oXsnC.jpg";
Mat tempImage = imread(fileName, cv::IMREAD_GRAYSCALE);
Mat bwImg;
cv::threshold(tempImage, bwImg, 150, 255, cv::THRESH_BINARY);
Mat openedImage;
cv::erode(bwImg, openedImage, cv::getStructuringElement(cv::MORPH_CROSS, cv::Size(3, 3)), cv::Point(-1, -1), 2);
cv::dilate(openedImage, openedImage, cv::getStructuringElement(cv::MORPH_CROSS, cv::Size(3, 3)), cv::Point(-1, -1), 2);
Mat closedImg;
cv::dilate(openedImage, closedImg, cv::getStructuringElement(cv::MORPH_CROSS, cv::Size(3, 3)),cv::Point(-1,-1),5);
cv::erode(closedImg, closedImg, cv::getStructuringElement(cv::MORPH_CROSS, cv::Size(3, 3)), cv::Point(-1, -1), 5);
namedWindow("Original", WINDOW_AUTOSIZE);
imshow("Original", tempImage);
namedWindow("Thresh", WINDOW_AUTOSIZE);
imshow("Thresh", bwImg);
namedWindow("Opened", WINDOW_AUTOSIZE);
imshow("Opened", openedImage);
namedWindow("Closed", WINDOW_AUTOSIZE);
imshow("Closed", closedImg);
waitKey(0);
system("pause");
return 0;
}
结果: