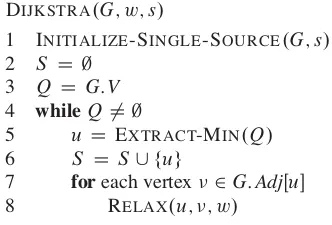
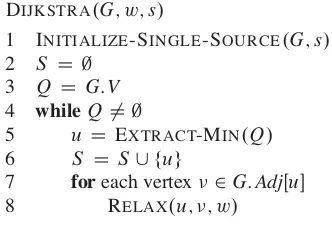
根据我的理解,使用下面给出的邻接列表计算Dijkstra算法的时间复杂度为大O符号。但是它并没有像预期的那样得出结果,所以我逐步理解了它。
- 每个顶点可以连接到(V-1)个顶点,因此每个顶点的相邻边数为V-1。假设E表示与每个顶点相连的V-1条边。
- 在最小堆中查找和更新每个相邻顶点的权重是O(log(V)) + O(1),即
O(log(V))。 - 因此从步骤1和步骤2可知,更新一个顶点的所有相邻顶点的时间复杂度为E*(logV),或者
E*logV。 - 因此所有V个顶点的时间复杂度为V*(E*logV),即
O(VElogV)。
但是Dijkstra算法的时间复杂度为O(ElogV)。为什么?
maxAdjacentEdgesOfAVertex * totalVertices >= totalEdges就是使得上限更紧的因素。更紧的上限意味着更接近真实值的估计。例如,如果一个算法执行了n + 10次操作,你可以说它是O(n^2)是正确的,或者是O(nlogn)也是正确的。但比这两个更紧的上限是O(n)。最紧密的上限被称为Θ,因此在上述示例中,n + 1 = Θ(n)。(Θ的定义是既是上限又是下限) - Shahbazlog函数,因此基数2有点被隐含了。 (看到我做的了吗?) - ShahbazO(E log V)假设给定的图是连通的。例如,在有很多孤立顶点的稀疏图的情况下,它将不成立。这就是为什么 Dijkstra 的二叉堆实现的最坏情况是O(V log V + E log V)。当我们不能假设E >= V时,它不能被降低到O(E log V)。 - DBedrenko