在我的UML模型中,我有一个系统和它的子组件彼此交流。例如,我有一台计算机和一辆RC机器人,它们通过蓝牙通信。目前,在图表中的流程大致如下:
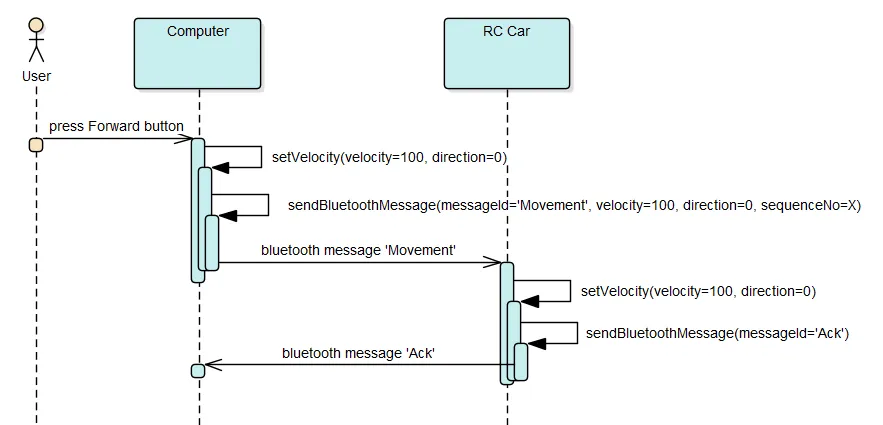
“计算机”触发“RC汽车”的“setVelocity()”函数。
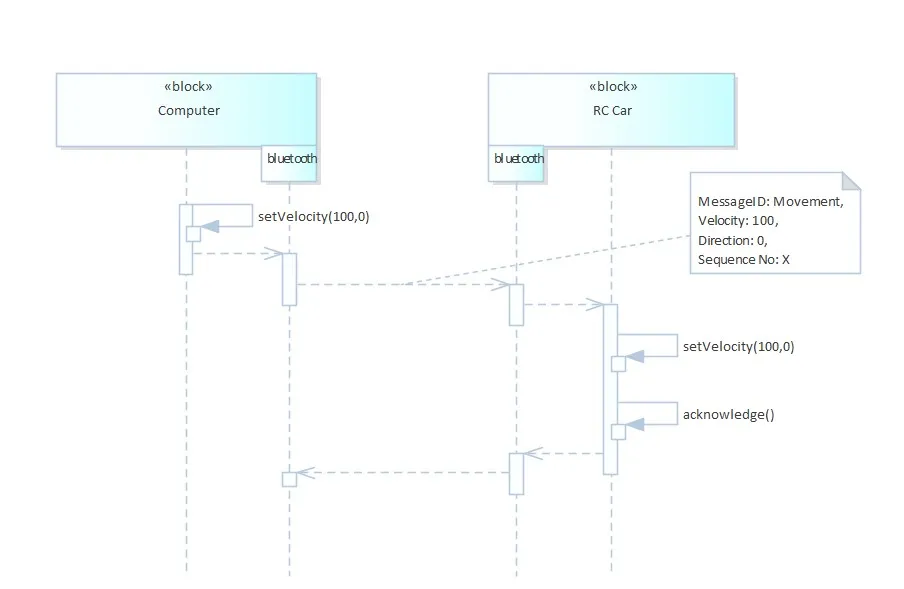
此时,我想通过以下方式细化通信:
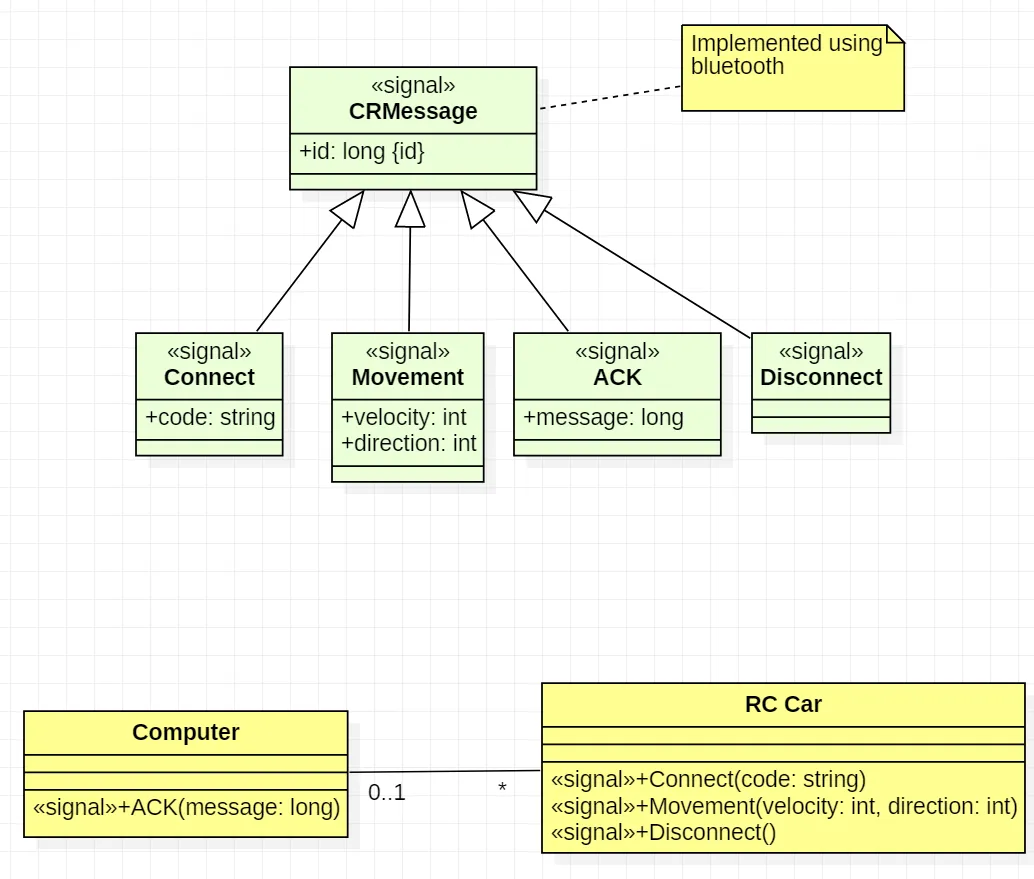
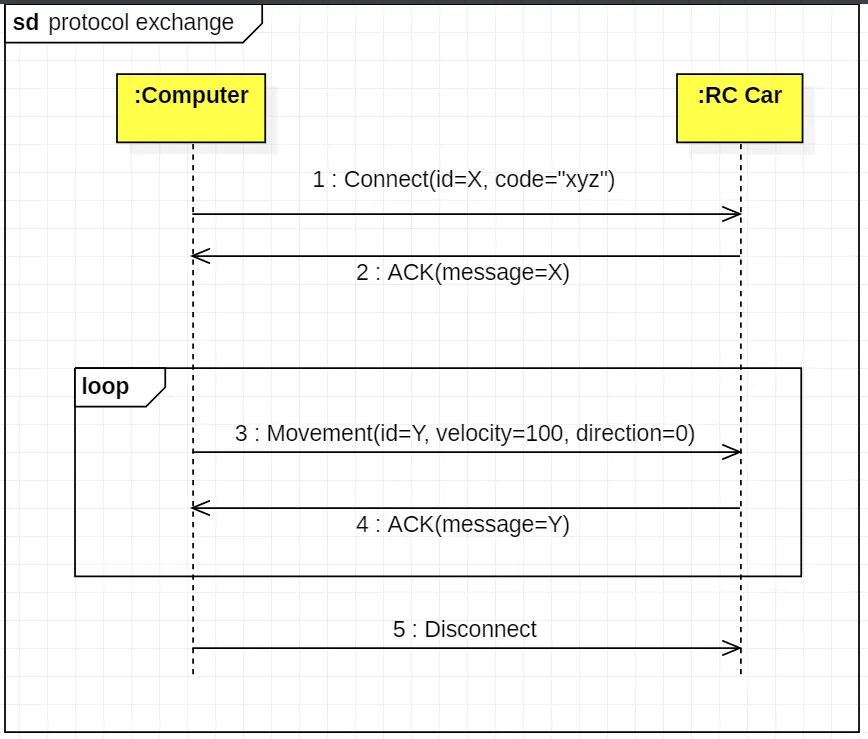
计算机发送“Movement”消息 速度字段设置为100,方向字段设置为0 RC汽车通过发送ACK消息确认 带有消息ID“Movement”和序列号X。
我该怎么做?
编辑:澄清
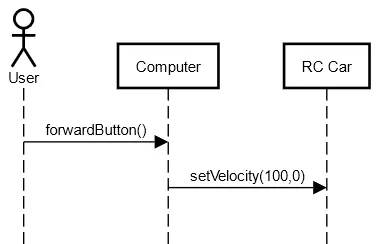
通常情况下,这就是我的图表,没有协议细节:
“计算机”触发“RC汽车”的“setVelocity()”函数。
此时,我想通过以下方式细化通信:
计算机发送“Movement”消息 速度字段设置为100,方向字段设置为0 RC汽车通过发送ACK消息确认 带有消息ID“Movement”和序列号X。
我该怎么做?
编辑:澄清
通常情况下,这就是我的图表,没有协议细节:
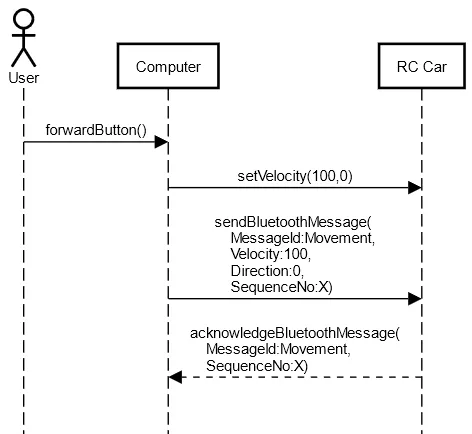
但是当我尝试添加消息时,至少存在两个问题:
- 似乎计算机首先按顺序触发了setVelocity()函数,然后是sendBluetoothMessage(),这些并不是顺序的。 setVelocity()后面的内容实际上是在该函数内部发生的。
- sendBluetoothMessage()实际上是计算机的一个函数。但是在这里它属于RC汽车。(或者我错了?)ACK也是同样的情况。